
简介
重要的安全与安防
输入确保功能安全的方法标题
 图1:内存级别的空间隔离
图1:内存级别的空间隔离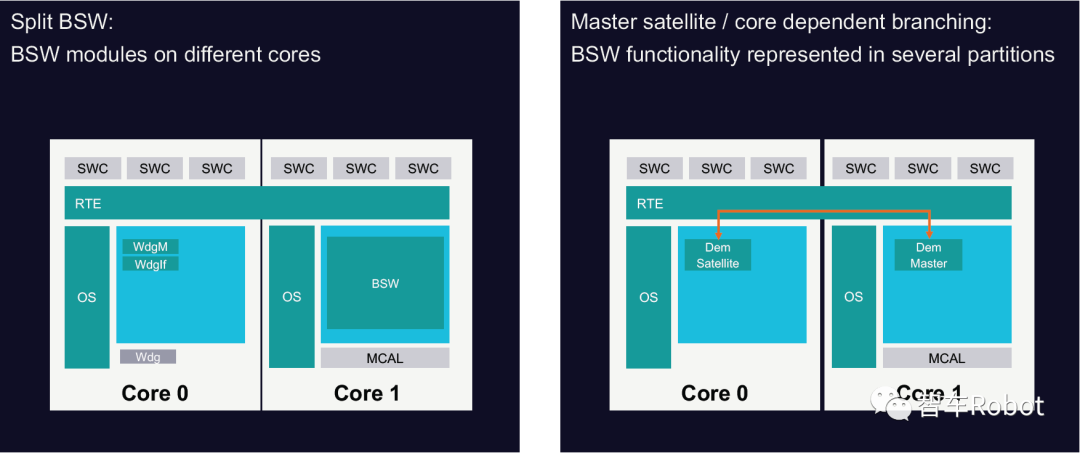 图2:内核级别的空间隔离
图2:内核级别的空间隔离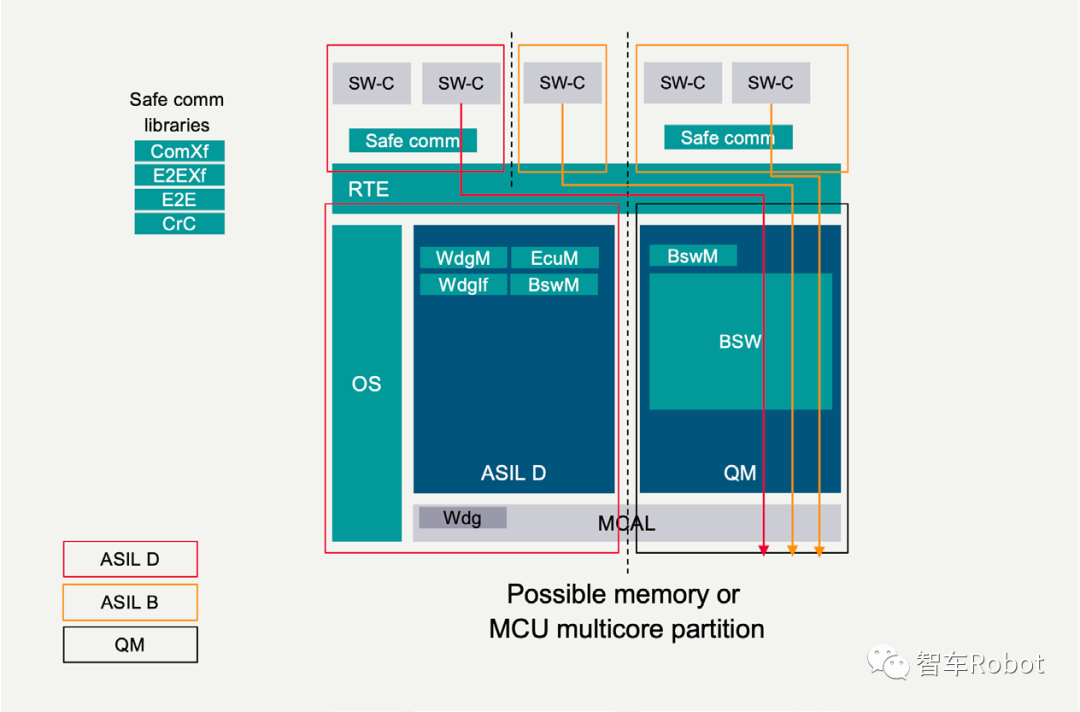 图3:无干扰
图3:无干扰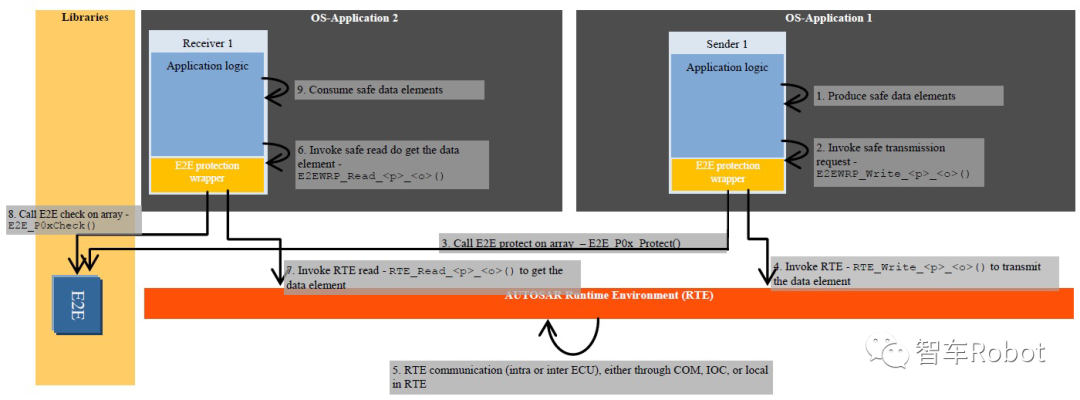 图4:端到端通信保护
图4:端到端通信保护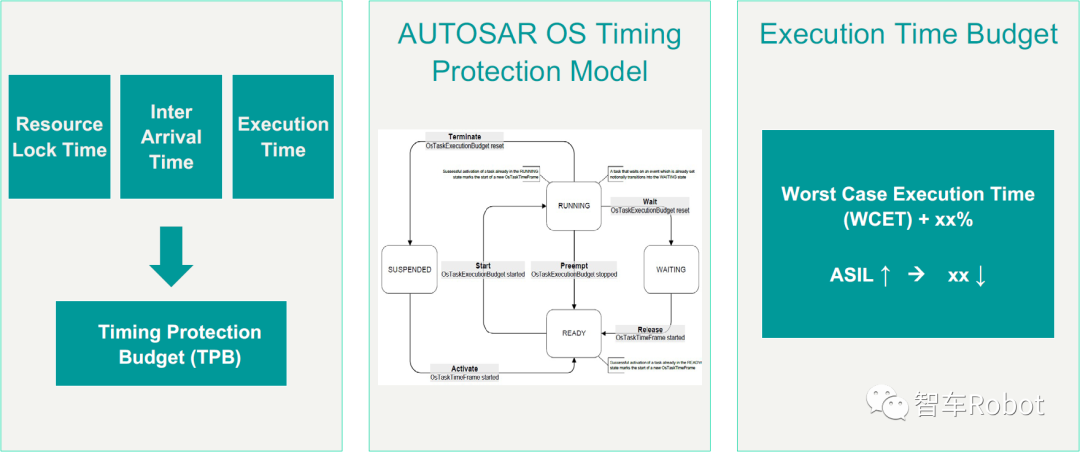 图5:时间隔离
图5:时间隔离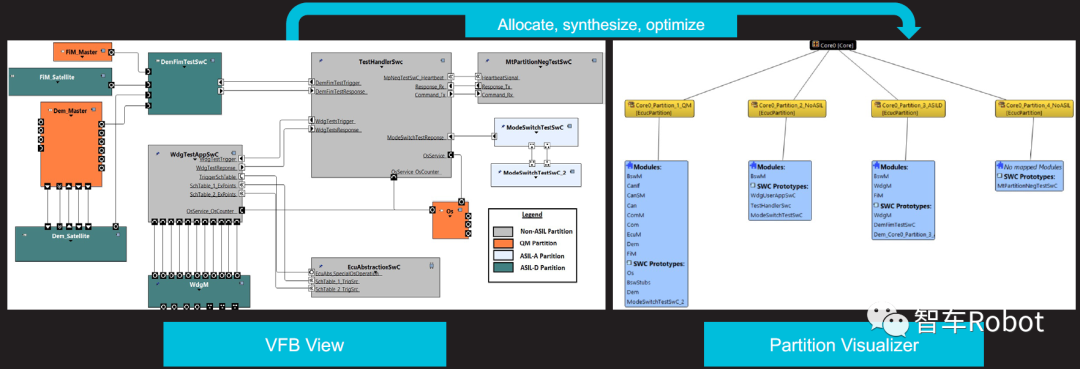 图6:用于在不同分区中分配BSW和软件组件(SWC)的工具支持
图6:用于在不同分区中分配BSW和软件组件(SWC)的工具支持确保系统一致性
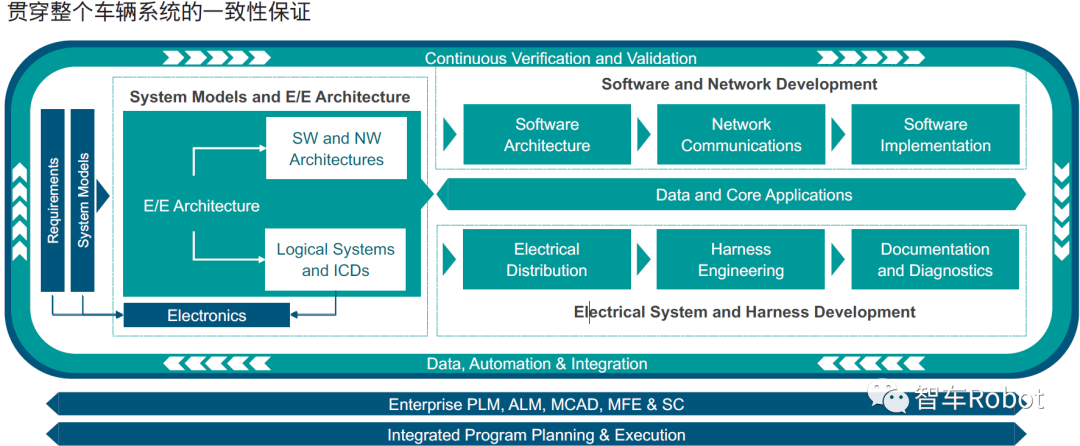 图7:面向功能安全合规的系统驱动型设计
图7:面向功能安全合规的系统驱动型设计混合安全关键系统
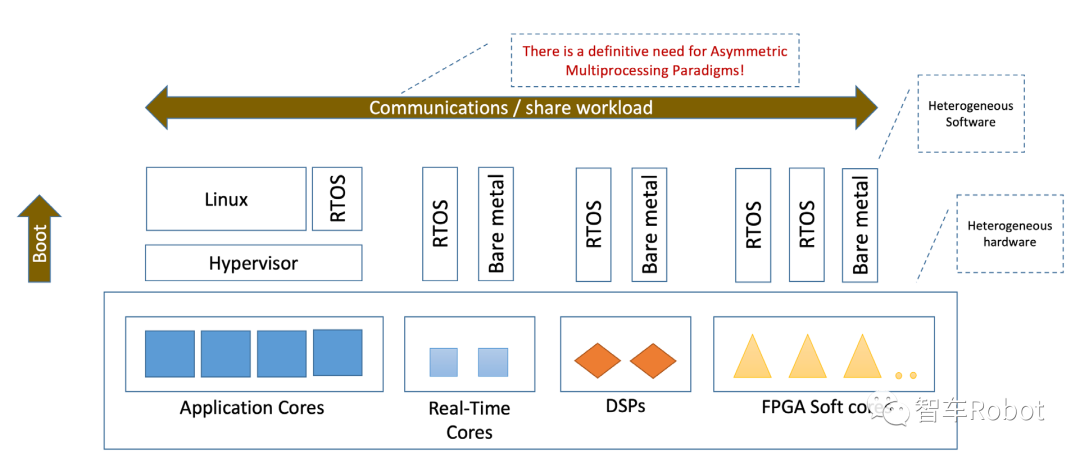 图8:嵌入式片上系统中的异构多处理
图8:嵌入式片上系统中的异构多处理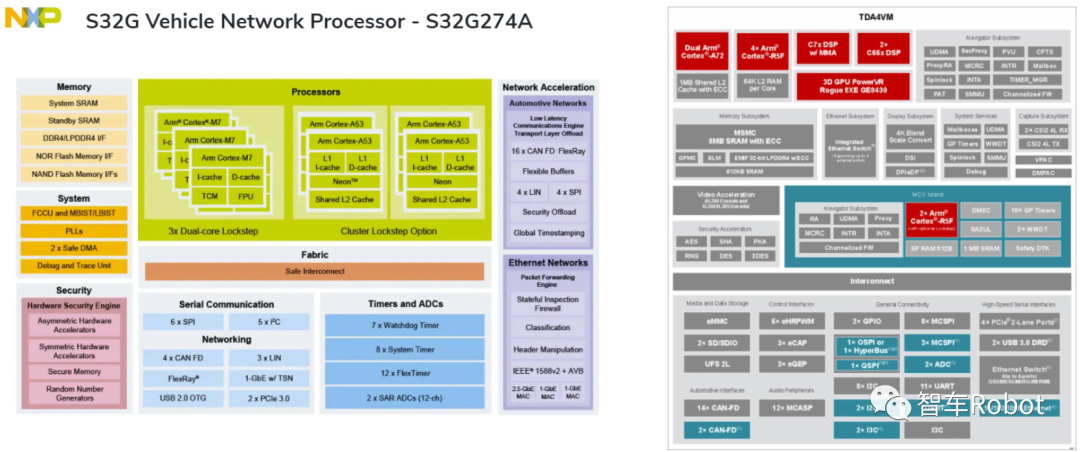 图9:S32G车载网络处理器
图9:S32G车载网络处理器复杂性带来的新挑战
 图10.2022款凯迪拉克凯雷德的内部
图10.2022款凯迪拉克凯雷德的内部 图11:混合关键系统的组成要素
图11:混合关键系统的组成要素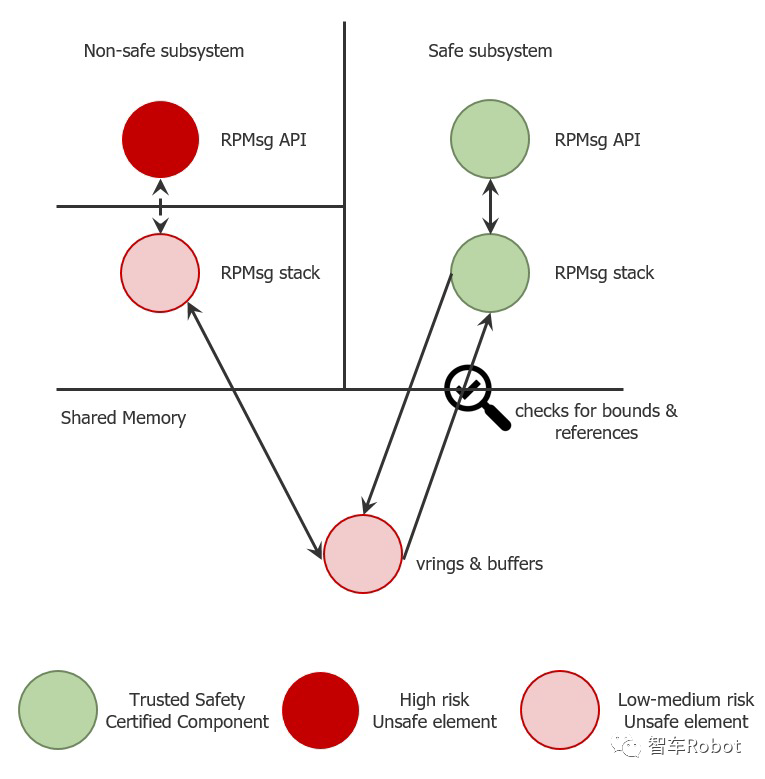 图12:在混合安全关键系统中保持安全通信
图12:在混合安全关键系统中保持安全通信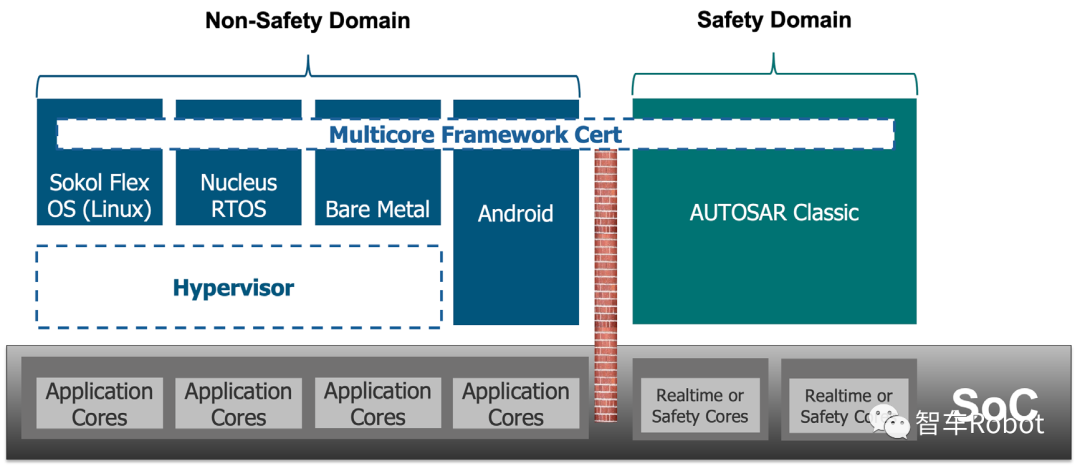 图13.由多核框架实现的混合安全关键系统SOC
图13.由多核框架实现的混合安全关键系统SOC结语
 最前沿的电子设计资讯
最前沿的电子设计资讯

