2022年,伴随着无数自动驾驶公司降维进入到智能驾驶赛道,L2+领航辅助驾驶产品正在以肉眼可见的速度进化和成熟。但定睛一看,这种进化和成熟还仅是局限在高速场景,对于打工人需求更旺盛的城市场景,几乎仍没有拿得出手的领航辅助产品。MBgednc
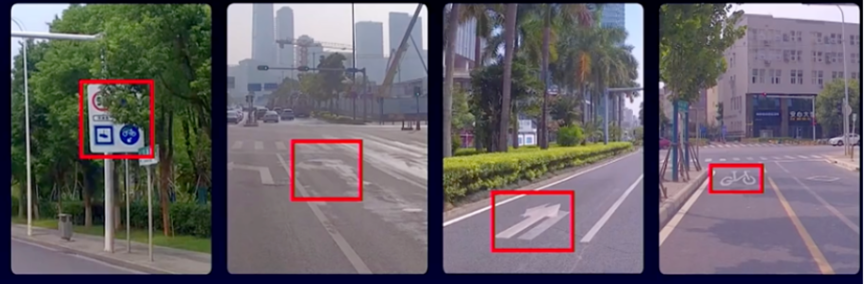
下文我们以泛化路测视频中的一招一式为起点,一步步深挖百度Apollo练就的浑厚内功。MBgednc
MBgednc






 最前沿的电子设计资讯
最前沿的电子设计资讯

