

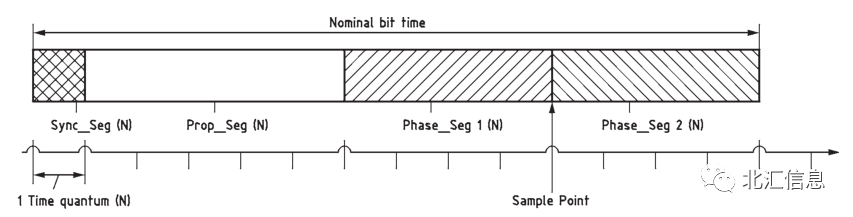
4个阶段的功能如下
🕳️对于CAN网络这个整体而言,各个节点应该尽量使用相同的采样点位置,否则容易出现采样错误,进而使整个网络的通信出现故障;
🕳️对于单个节点而言,过早的采样使得节点易受位时间初期的电平波动影响,进而导致采样错误;
🕳️受限于重同步的要求和相位缓冲段的宽度,CAN控制器无法过晚采样。

🕳️在开始采样点测试之前,我们需要设置VH6501自身的采样点;
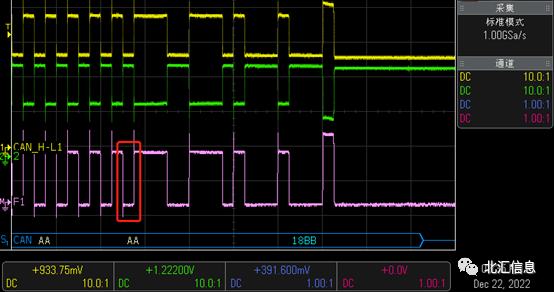
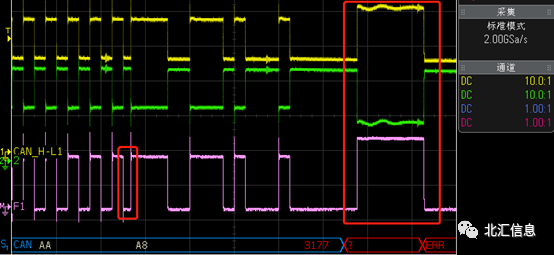
🕳️VH6501使用一连串的脉冲电平来构建仿真报文;
🕳️从后往前逐次翻转仿真报文数据场的各个脉冲的电平极性,直到干扰到待测ECU的采样点,使得待测ECU发送错误帧。
🕳️VH6501和待测ECU之间的位时间偏差造成的系统误差:理想情况下500 Kbps的传统CAN的位时间长度为2 μs,但实际环境里,待测ECU和VH6501的位时间与标准的位时间之间存在一定的偏差。如果ECU的位时间大于VH6501的位时间,采样点的测量结果会比实际值偏大;当样件的位时间小于CANoe设定的位时间,采样点的测量结果会比实际值偏小。这样的系统误差无法通过改进测量方法来降低。
🕳️测试方法引起的误差:前文介绍采样点测试方法中提到,采样点测试是通过VH6501翻转待测ECU采样点附近的电平极性实现的。但是采样点是一个“时间点”,而VH6501干扰的是时间段。因此每次干扰的时间段的长度将直接影响采样点测试的误差大小。常用的测试方法中,每个位时间由16个Tq组成,每次翻转一个Tq。最终的实际结果相对于正确结果可能存在±6.25%的偏差。但是在介绍采样点测试方法中我们提到,VH6501使用脉冲序列来构建报文,每个位时间由320个脉冲组成。那么通过缩小每次翻转的电平长度,可以将±6.25%的误差缩减至±0.3125%。
解决方法有两种。一是增大位时间,增大传播段的Tq组成数量,但是这种方法会降低位速率,因此和CAN FD高速目标相冲突。二是采用传输时延补偿,即在发送节点回读总线状态时引入一段传输时延补偿,进而保证位错误检测的需要。而引入这段传播时延补偿的结果即为第二采样点(secondary sample point,缩写 SSP)。
1.科普系列:AUTOSAR与OSEK网络管理比较(上)
2.科普系列:AUTOSAR与OSEK网络管理比较(下)
3.测试开发实践系列:为支持全车OTA的LIN诊断刷写
4.妙用CANoe对LIN节点球形阀进行自动化PV验证
往期精彩


 最前沿的电子设计资讯
最前沿的电子设计资讯

