
早在2016年,马斯克就在《特斯拉宏图计划第二篇章》提到要发展自动驾驶,但特斯拉与当时最热的自动驾驶技术路线有所不同——Google的Waymo为代表的众多自动驾驶企业,以L4级别和量产自动驾驶出租车Robetaxi为目标。
特斯拉走的垂直整合路线:不仅自己开发自动驾驶相关的软件和硬件,还自己造车:开创了将自动驾驶与汽车量产结合的技术路线——简单来说,就是在量产车上安装低级别自动驾驶系统收集数据,凭借数据不断完善自动驾驶算法,最终实现由较低级别的自动驾驶向高级别自动驾驶间融合过渡。

目前来看,后者的自动驾驶技术方案是比较成功的。他的路线甚至从车成功复制到机器人。
那么特斯拉是怎么考虑智能汽车的设计的呢?

Part 1
特斯拉与传统主机厂把设计开发交给供应商的方式不同,而是反过来,不断从供应商手中拿回主导开发权。我们看到,在整个EE架构里面,特斯拉不断在把大量的部件做成In-house Design然后再由非传统的一级供应商来代工的模式进行,不断把系统内化。
特斯拉会和芯片企业直接交流设计开发,这样一方面在过去几年缺芯的状态下,可以优先获取支持。另一方面,这样的直接接触,可以把自己的设计思路传递到芯片企业,同时获取最新的设计方案。
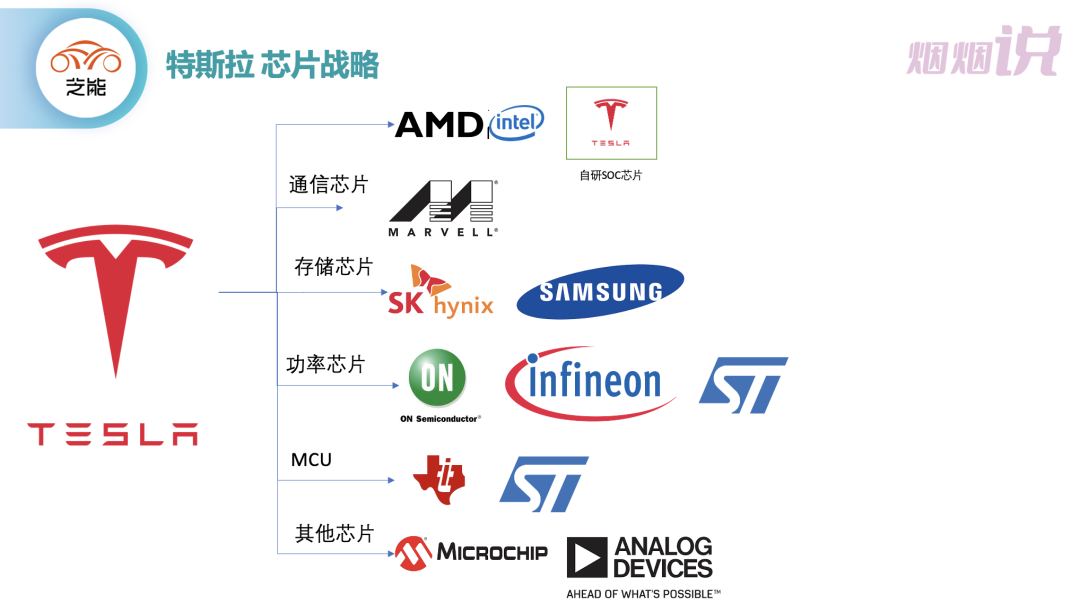
◎最重要的计算类SOC芯片:座舱层面依靠Intel和AMD计算芯片、特斯拉自研FSD的芯片
◎通信芯片:从以太网的Marvell扩展到下一代
◎存储芯片:SK海力士和Sumsung
◎功率芯片:由SiC的英飞凌和ST供应,低压小功率的主要包括安森美
◎MCU:全方面的拥抱TI和ST
◎其他芯片:也是和ADI、Microchip等战略芯片供应商合作
特斯拉在设计电子电气架构时,不仅从Model 3 开始就采用了集中式的架构,还很早就导入了Zonal控制器的概念,这样的架构可以尽可能的简化线束,提高整车安装效率。

特斯拉设计了三个区域控制器,分布在车身的左、右和前部中间,这三个控制器大量合并了原有分布式系统的功能,比如:车身控制、热管理、驻车还有座椅控制等。
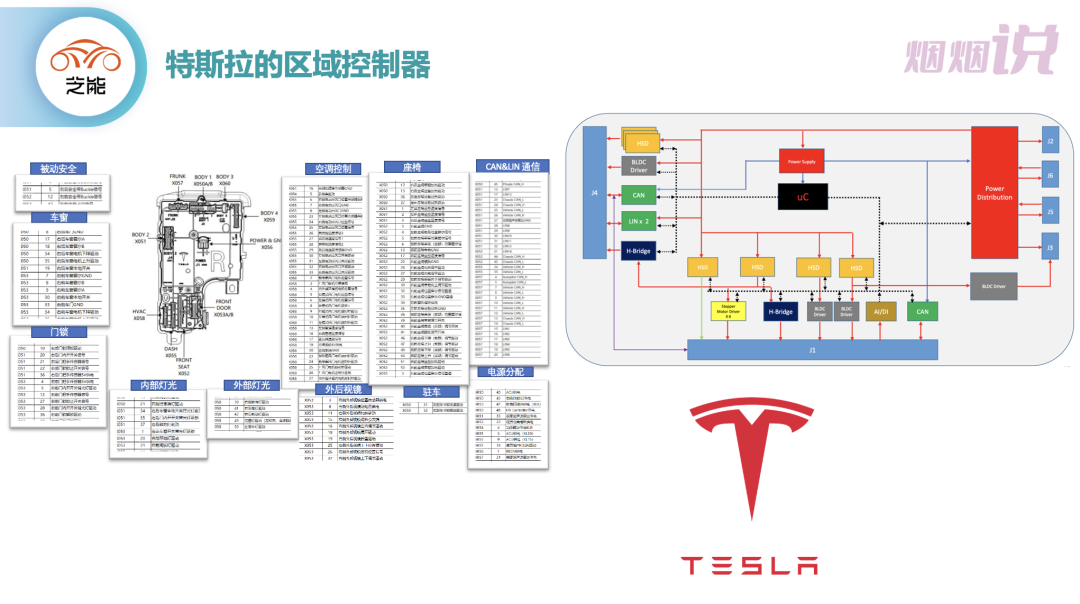
如果按其他车企的设计,至少会分为七八个模块(门模块、集成式车身控制器、座椅控制器、热管理控制器HVAC和前端冷却控制器Theraml Unit和泊车控制器、灯光控制)。
但特斯拉通过这三个区域控制器既能实现基本功能,又可以做一些顶层的应用,实现系统的整体控制。整个控制逻辑复杂的部分都在上层,底层的可以实现冗余和执行功能。
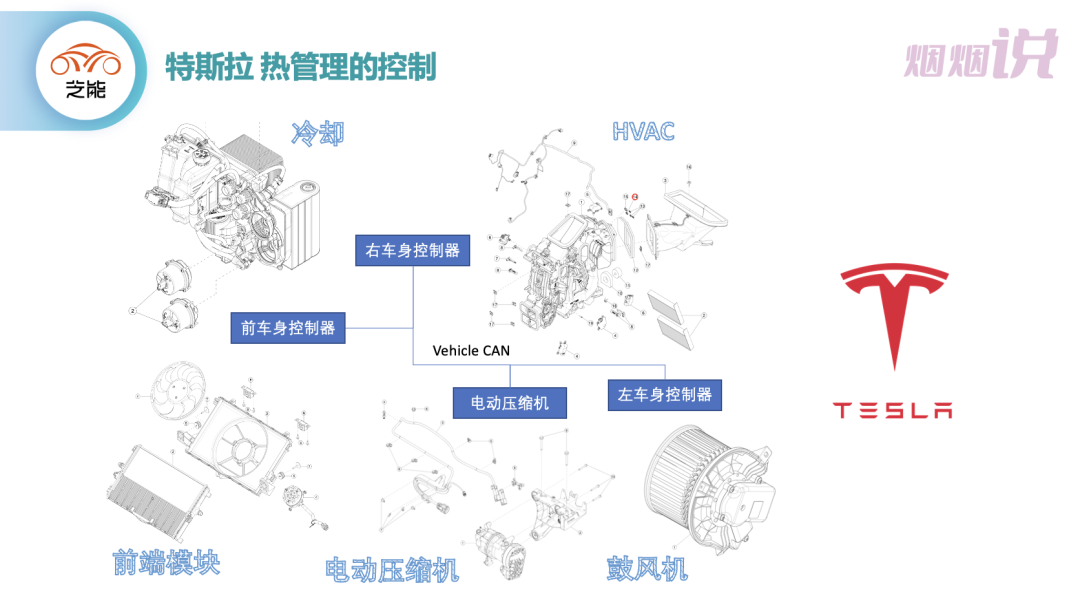
比如热管理的控制中,复杂的热泵模式功能是在顶层的软件系统里面来定义的,再由区域控制器负责执行。这个创新性的设计,就让特斯拉把握了整体软件和系统方面的设计,供应商只负责做结构设计集成,特斯拉在热管理功能上实现了自主开发控制。

Part 2
2019 年前后,自动驾驶技术堆栈出现了颠覆性变化,特斯拉引领了这次变革。这次变革是从规则驱动,转向为数据驱动。这几乎改变了整个技术堆栈,甚至是工程师的思考方式。
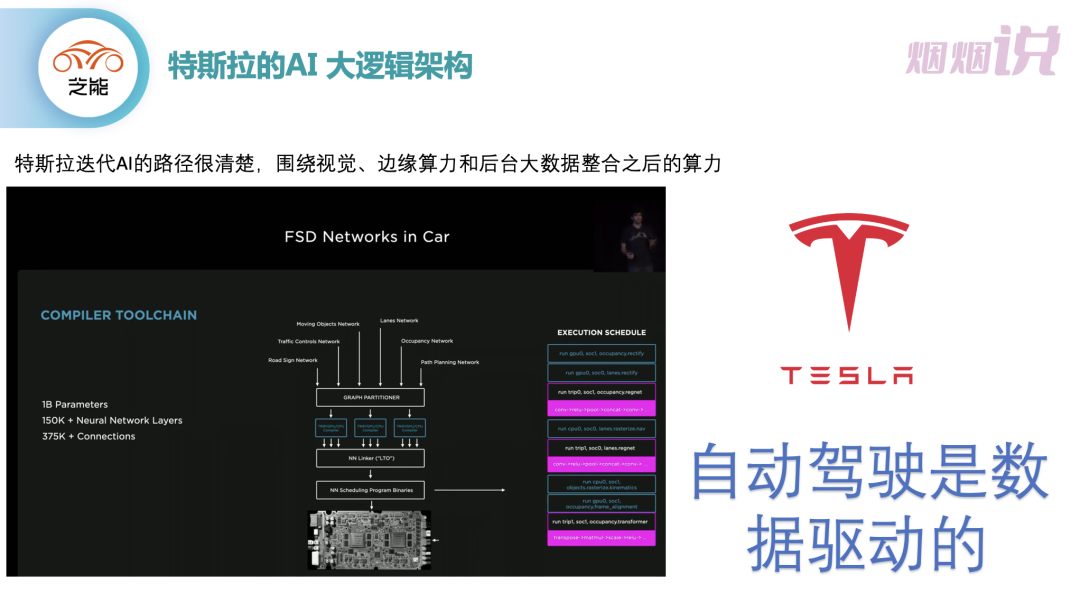
所谓规则驱动,简单来说,以前的自动驾驶,是依靠提前设计好一定的规则;数据驱动,则是围绕AI的算法模型,通过感知AI、规控AI,以及数据改进自动驾驶的效果,跟现在很火热的ChatGPT类似。
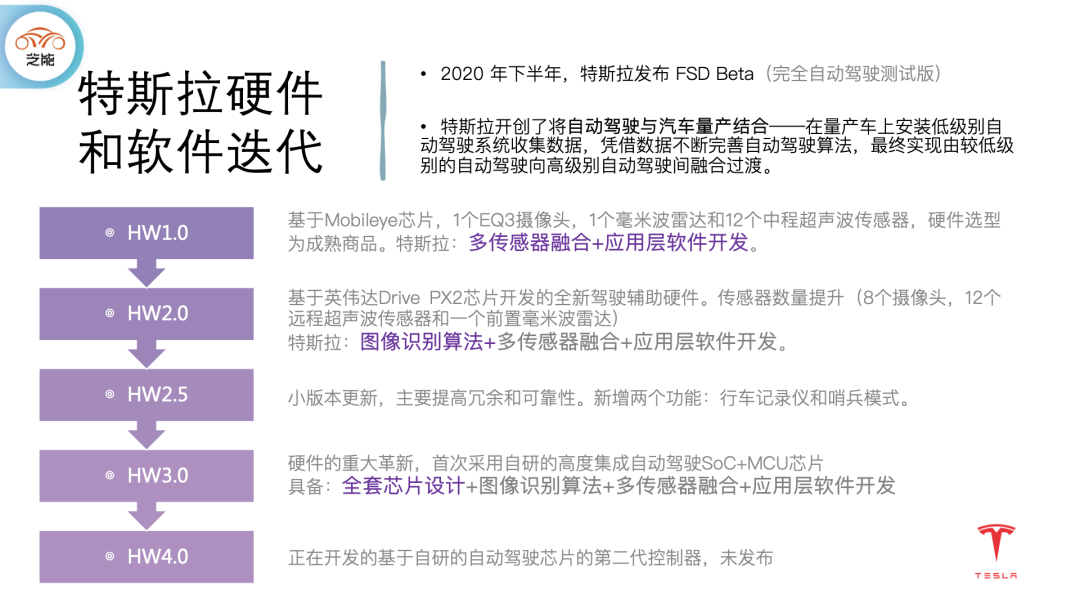
特斯拉的驾驶辅助硬件经过了HW1.0到3.0的迭代:
◎ 正在开发的基于自研的自动驾驶芯片的第二代控制器,也就是4.0版本,马上要发布,我们会持续地跟踪。
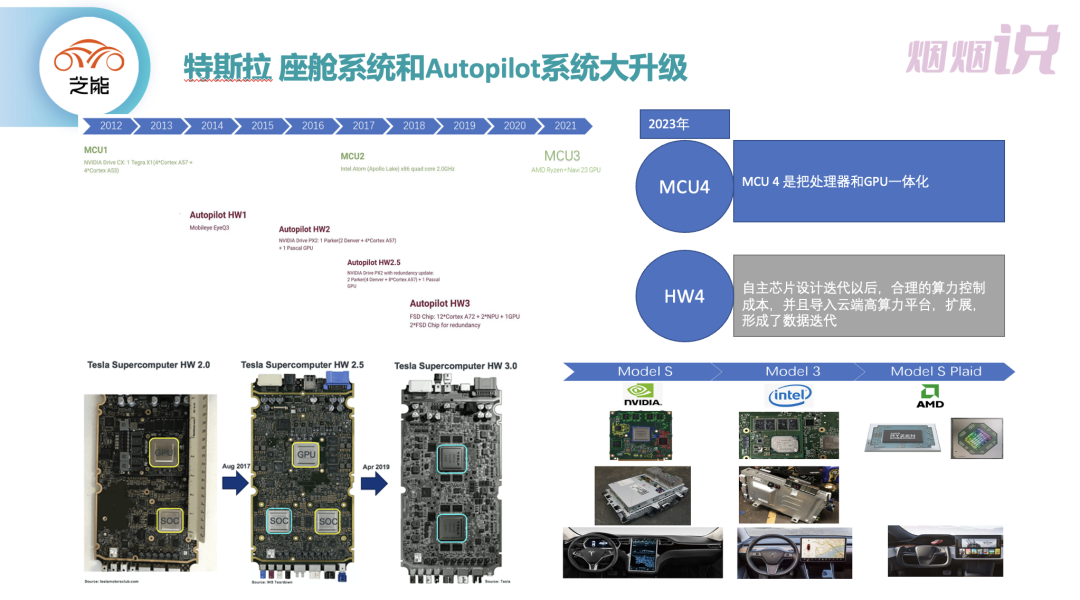
我们看到特斯拉在Model S、Model X、Model 3到Model Y上,一步步深化了自己的设计范围,而全球车企包括大量的中国汽车企业也开始了这个过程。
虽说特斯拉的自动驾驶技术路线很成功,但并不是没有问题。首先就表现在有各种召回。这是因为自主设计的开发难度的确很大,随着车主增多,会遇到很多激进的工况。但换个角度来看,特斯拉就是通过量产车上收集到的数据不断完善自己的产品,最终要实现不仅是智能汽车,还有马斯克本人的Master plan。
 最前沿的电子设计资讯
最前沿的电子设计资讯

