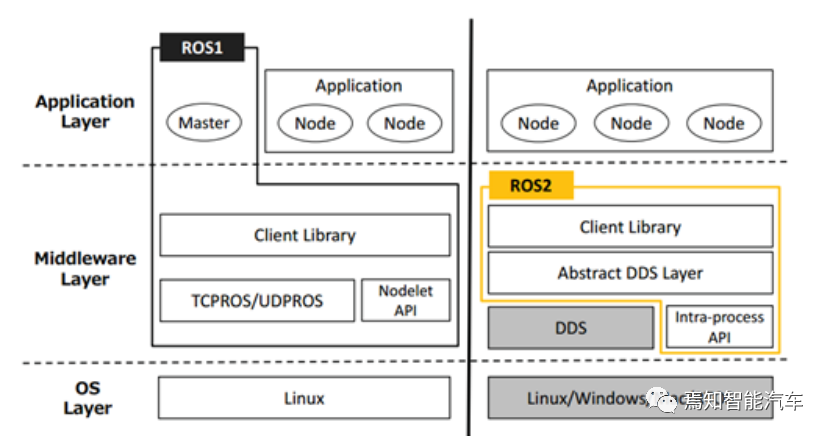
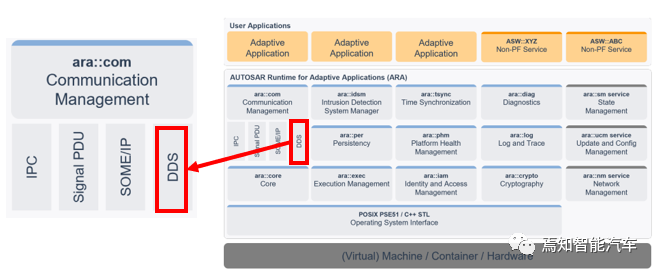
早年间,各大公司都针对ROS1弱点做了很多优化,以让其适用于汽车。而这些研究和改进当然也反馈到ROS组织本身,所以也就有了上文提到的ROS2。那么ROS1和ROS2有什么差别呢?ROS2对这些弱点有改进吗?话不多说,我们先来看看两者的系统架构框图对比。图5:ROS1和ROS2的系统架构框图对比由下往上看,在操作系统层,ROS2比ROS1支持的底层操作系统更多,也支持实时操作系统(RTOS)了。这就让ROS2可以支持更多样化的嵌入式硬件,例如汽车应用中一些轻量化的ECU。在中间层,ROS1更多地依赖TCP和UDP协议,而在ROS2中则引入了DDS。DDS全称是Data Distribution Service 数据分发服务,是一种分布式实时通信中间件协议,也是一个被很多公司实现的工业标准。DDS采用发布/订阅体系架构,强调以数据为中心,提供丰富的服务质量(QoS)策略,以保障数据进行实时、高效、灵活地分发。正是基于DDS的通讯机制,ROS的应用层就不再需要Master节点。节点之间采用自发现机制,找到彼此,进而建立稳定的通信连接。这对于满足功能安全需求,有很大帮助。当然,ROS1和ROS2的应用层软件接口是匹配的,让ROS1上开发的应用软件能快速复用部署到ROS2上,也是ROS2的设计目标。由此可见,上文提到的ROS1在汽车应用上的弱点,在ROS2上都得到了针对性甚至是根本性的改善。









 最前沿的电子设计资讯
最前沿的电子设计资讯

