
1.模型泛化
2.不确定性估计,数据质量和数量评估
3.多智能体与智能体-环境交互
4.安全与可靠性
5.计算效率
6.利用多模态融合进行最优决策
7.可解释性和可说明性
8.无需高清地图的自动驾驶
本篇文章将着重模型泛化、不确定性估计以及数据质量和数量评估和多智能体与智能体-环境交互这三个方面
自动驾驶汽车必须具备在各种环境和多样化条件下的运行能力。然而,这些环境和条件可能与用于开发决策模型的训练数据存在差异,从而导致模型的泛化能力不足,即在新的和未曾遇到的情况下表现欠佳 [1]。自动驾驶模型应具备适应不断变化的环境条件的能力,例如不同的光线、恶劣天气、突发障碍、异常交通模式、多方交通参与者以及不同的道路表面,从而实现在这些多变环境中的多智能体互动模型的泛化能力。
为确保自动驾驶汽车的安全性和可靠性,模型必须对环境变化表现出鲁棒性。反之,若对这些变化过于敏感的模型可能在泛化能力上不足,从而导致在实际驾驶场景中的表现不尽如人意。
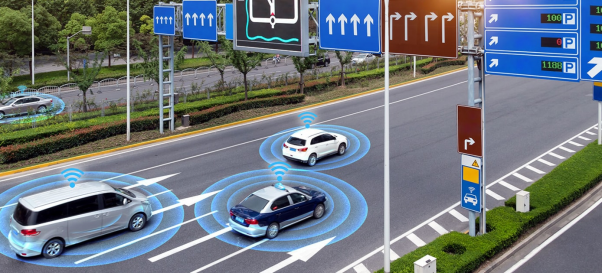
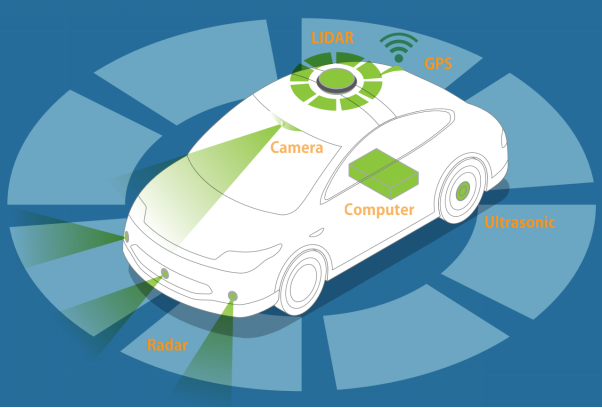 图2. 载有多传感器的车辆 [4]
图2. 载有多传感器的车辆 [4]
自动驾驶系统的运行依赖于精密且复杂的决策方法,这要求对不确定性进行准确的估计,并对数据的质量和数量进行全面的评估。这些高度先进的系统利用各种传感器,如摄像头、激光雷达和雷达,来获取关于周围环境的详细信息,并基于这些数据作出行驶决策。然而,这些数据通常存在噪声、不完整性,以及受到各种误差来源的影响,这可能导致不准确的决策和潜在的不安全驾驶行为。因此,在开发和优化自动驾驶系统时,关键是要设计出能够有效识别和处理这些问题的算法,确保在各种情况下都能实现稳定、安全的驾驶。

在复杂的交通场景中,自动驾驶汽车需要与道路上的各种智能体进行高效且安全的互动,这些智能体包括其他自动驾驶汽车、人类驾驶的汽车、行人和骑自行车的人。这些智能体的行为可能具有难以预测的性质,因此对自动驾驶汽车的决策系统提出了巨大挑战。一个智能体的行为可能会引发连锁反应,从而影响环境中其他智能体的行为和动态。为了应对这种复杂性,自动驾驶系统需要具备高度的适应性和响应能力,以便在实时变化的交通环境中进行有效的决策。此外,自动驾驶汽车还需能够根据实际情况预测其他智能体的意图和行为,从而在确保行车安全的同时提高道路通行效率。
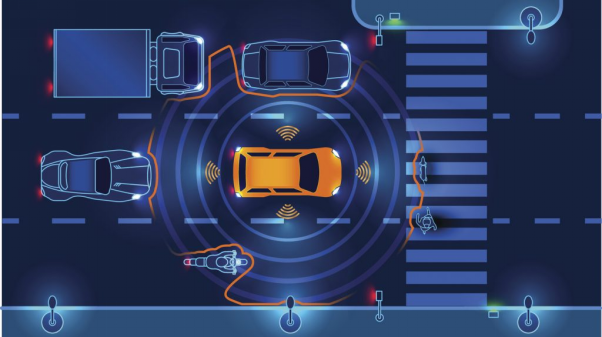
1.博弈论模型:博弈论模型是解决多智能体互动挑战的有效方法之一 [17]

 最前沿的电子设计资讯
最前沿的电子设计资讯

