
刚刚过去的2023上海车展我自然不会错过,除了给公司站台,就是把辅助驾驶相关的参展商仔细逛了一遍,尤其是自动驾驶域控制器。于是想写这篇文章,和大家交流一下感想。我会努力用一个简单的逻辑,站在系统的角度,把自动驾驶域控制器要做什么、要怎么做进行以及目前流行的方案做一个梳理。由于很多读者朋友是学生或者刚转行不久的新人,和以前一样,我会尽量把文章写得浅显一些,并且铺垫多一些。有相关经验的同学可以直接跳第四章。
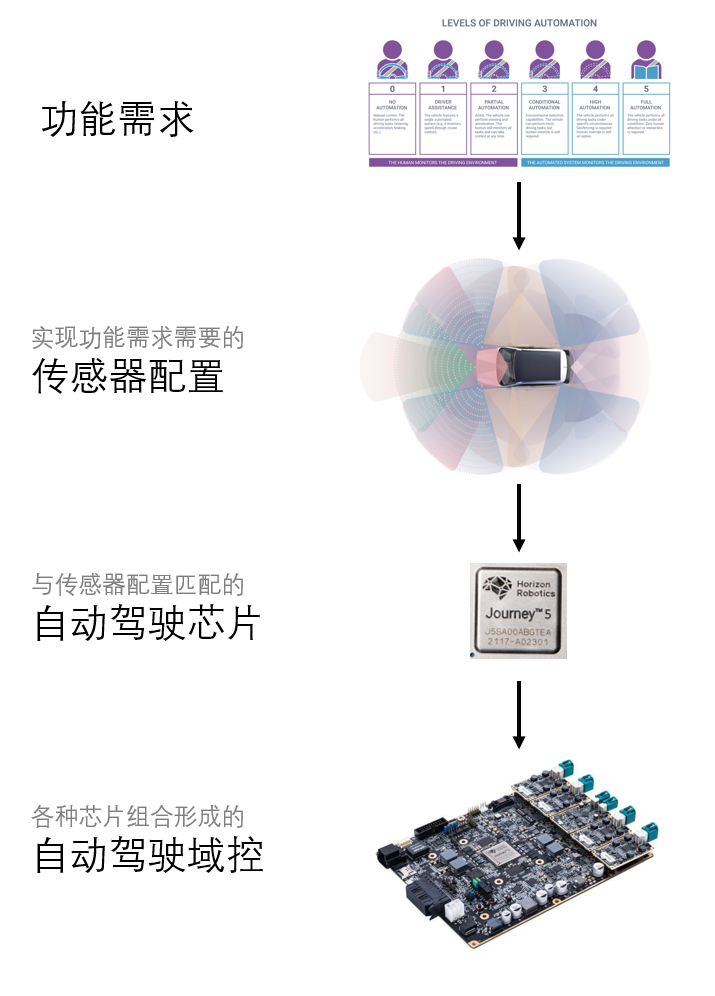
在汽车领域,分析或者介绍一个控制器,一般都从其最顶层需求(功能)入手。对自动驾驶域控而言,它的顶层需求是“实现一定的辅助驾驶功能”,一切都是为这个目标服务的。受制于成本,不同的域控能实现的功能自然是不同的,于是对辅助驾驶功能需要分级介绍;为了实现这些辅助驾驶功能,还需要有不同的传感器配置方案作为基础;基于不同的传感器配置,要选择与之相匹配的自动驾驶芯片,确保芯片算力能够实时处理传感器的海量数据;最后,不同的自动驾驶芯片进行各种排列组合,就形成了目前行业内琳琅满目的自动驾驶域控方案。以上,就是这篇文章介绍域控制器的逻辑主线。
对于术语称呼,标题里说的“自动驾驶域控制器”,Advanced Driver Assistance System Domain Controller,严格来说得叫“辅助驾驶域控”或者“智能驾驶域控制器”,因为业界对ADAS和AD还是有比较明确区分的。但是似乎大家都叫“自动驾驶域控”,所以后面我就不严格区分了。
近年只要是关注汽车行业的,大多都听说过SAE对自动驾驶进行的L0至L5的分级定义[1]。
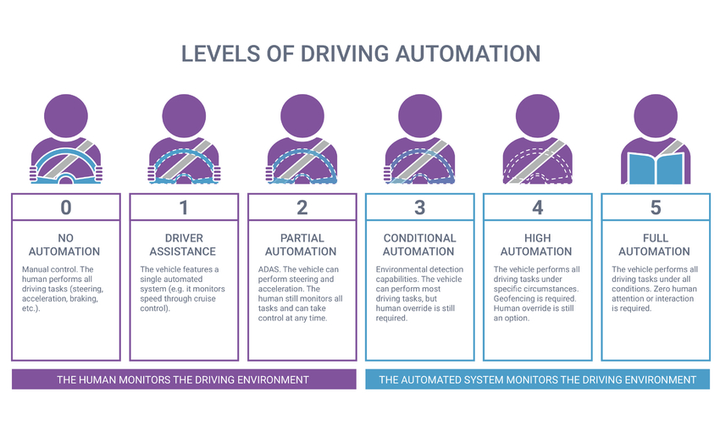
相关介绍文章很多,不再赘述。这里我想结合业界各家公司的实际宣传现状,做一个新分类。目前在国内市场能实际买到的车型中,对自动驾驶类功能的丰富程度也可以分成五级:
行车功能主要包括:
ACC自适应巡航(全速域/非全速域)
FCW前向碰撞预警
AEB自动紧急制动
LDW车道偏离预警
LKA车道偏离辅助
LCC车道居中保持
泊车功能包括全自动泊车。
做到这些,整车厂就会宣传车辆具备“L2辅助驾驶功能”。一般市面上十至十五万级的车型都会配置。便宜一点的例子比如吉利帝豪S[2]这种十万级车型也有(你没看错,现在十万的车型就有辅助驾驶了,卷出了天际)。需要注意的是,实现这些功能一般不需要自动驾驶域控制器。

行车功能主要包括:
ACC自适应巡航(全速域)
TJA交通拥堵辅助(ACC+Stop&Go+循前车轨迹)
ALC拨杆变道辅助
FCW前向碰撞预警
AEB自动紧急制动
RCW后方碰撞预警
RCTB后方横穿制动
LDW车道偏离预警
LKA车道偏离辅助
LCC车道居中保持
ESA紧急转向避障
BSD盲区预警
TSR交通限速识别
泊车功能包括APA全自动泊车和RPA遥控泊车。
虽然丰富了不少,但严格来说这些功能就是L2而已,但市场宣传方面总得体现出和十万级车型有区别吧,于是生造了个"L2+"的概念。具体车型例如领克01[3]。车价也来到了十五至二十万这个量级。一般从这个阶段开始,自动驾驶域控开始上车了。

这一级车型,行车功能包括以上全部,加高速领航辅助,即高速NOA。泊车功能有的还会增加记忆泊车HPA等。很遗憾,这些功能还是属于L2,但是车企这里就开始玩花活了,什么“L2++”、“L2.5”、“L2.9”还有什么“L2.99”都来了。目前能实现高速NOA功能的车型都在二十万以上的。典型车型包括蔚来、小鹏、理想等等这些造车新势力的绝大部分车型。比如蔚来EC6[4](得选配大NP包)。

这一级车型,行车功能包括以上全部,加城区领航辅助,即城区NOA。泊车功能基本与以上相同。进行了城区NOA硬件预埋的车型一般都在二十五万以上。事实上目前(2023年5月3日)推送了城区NOA功能的就只有小鹏G9、P7i[5]和P5(上海、广州、深圳)以及北汽极狐阿尔法S·HI版(深圳、上海)、阿维塔11(深圳、上海)这5款车。当然,其他包括蔚来、理想、智己、广汽埃安等等一堆车企都宣称会“很快”推送城区NOA。

这个不用多说了,量产实现L3功能的全球目前就奔驰S级(包括EQS)这一款车。另外一个本田Lengend只租不卖、而且产量也很小,感觉更多像是一个噱头。我在德国的时候恰好参与了Drive Pilot[6]中一部分横纵向控制功能(DTRQ+, Diamler的小伙伴们肯定知道)的量产设计工作,不过没等量产我就撤了。感觉最后量产的性能和最初的设计要求相比还是做了妥协。

另外,目前还没有真正量产实现L4功能的车型。通用汽车Cruise[7]倒是在美国旧金山、奥斯丁和凤凰城三个地方开始了全无人商业出租车运营,但是都只是在晚上至凌晨运营,数量也比较有限。而且这外形一看就离大规模量产还很远。。。这种情况我们就不讨论了。

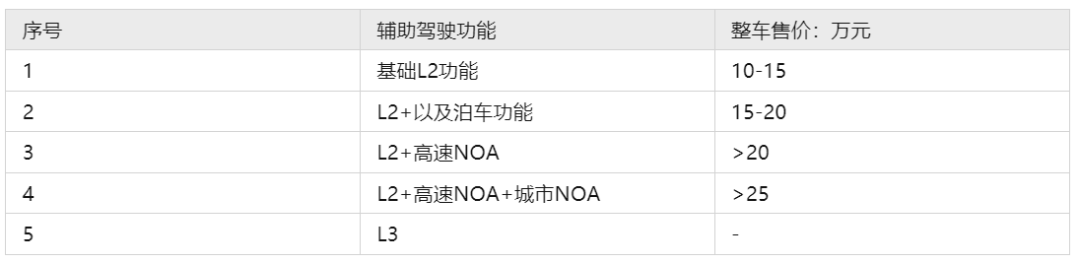
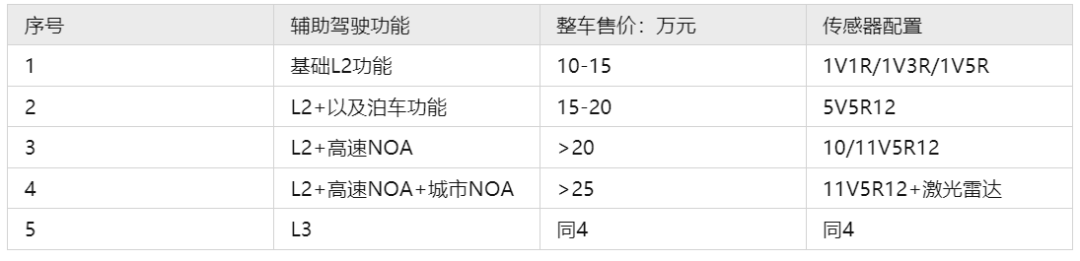
总结一下,根据辅助驾驶功能的丰富程度,我们可把辅助驾驶分成以下五级(不考虑L4/L5):
表1:辅助驾驶功能
上面把量产车型的辅助驾驶功能分了五个等级,每个级别的功能需要通过不同的传感器配置方案来实现。当然每个级别的传感器方案不是唯一的,不同级别之间方案也有可能共用或者重叠。需要强调的是,实现辅助驾驶功能不是靠堆传感器。传感器只是整个自动驾驶系统中的一小环。限于篇幅这里就不展开了。
我们这里挑一些最典型的情况介绍。
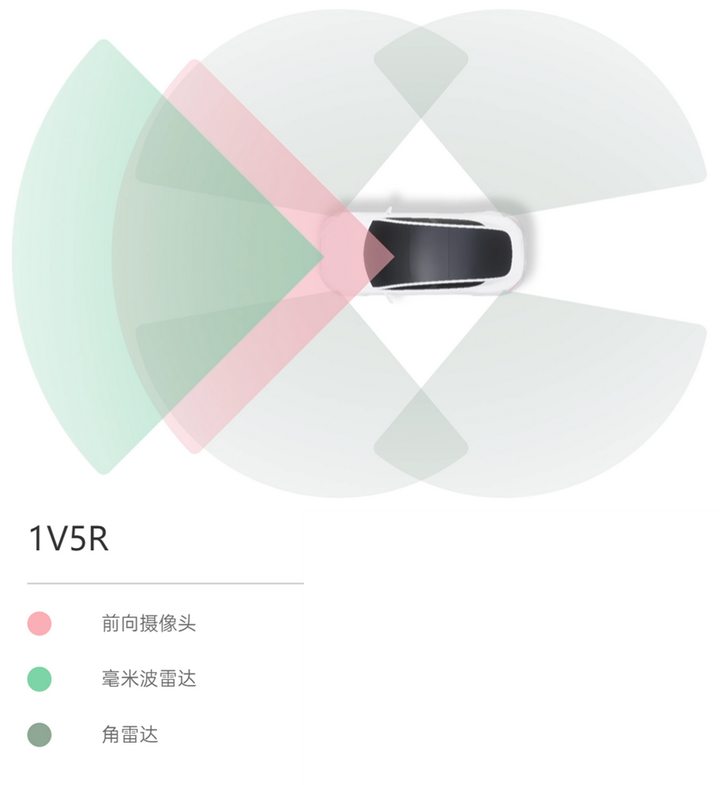
实现基础L2功能一般通过1V1R,即一个前视摄像头和一个前向毫米波雷达就可以实现了。摄像头负责前方车辆、弱势交通参与者、车道线等的识别,毫米波雷达进行感知融合。追求极致性价比的车型,只通过一个高清摄像头也行,无非就是不融合了,性能表现稍微差点意思。常见的其他配置还包括1V3R(在1V1R基础上增加两个后雷达以获得有限的后方感知能力)、1V5R(在1V3R基础上再增加两个角雷达)。
对于泊车功能,为了追求性价比,一般会搭载12个超声波传感器(USS)(下图没画出来)。

图片来自佑驾创新Minieye官网[8]
前面提到过,这么简单的传感器配置,算力要求不高,再加上突出性价比,一般也就不需要域控制器了,行车和泊车的控制也是完全分离的。
要实现这些功能,典型的传感器配置是5V5R12U。即在1V5R12U的基础上,再增加4个广角环视摄像头。

图片来自佑驾创新Minieye官网[9]
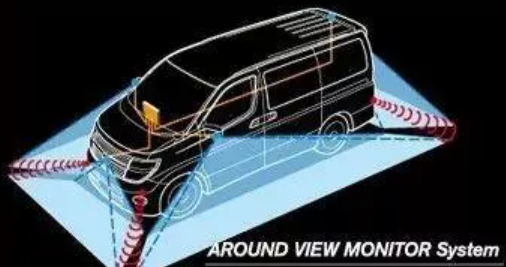
如上图示,通过在车辆前保、后保/后尾门上方、左右后视镜下方布置四个广角环视摄像头,可实现车辆近距离360度感知、可用以实现自动泊车,结合四个角雷达,能实现对行车盲区以及后方来车的监控,最终实现L2+的功能。
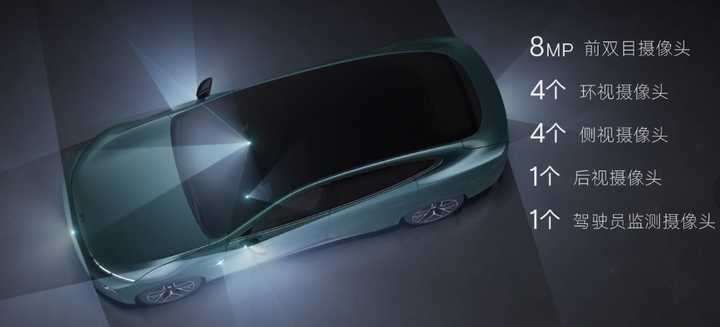
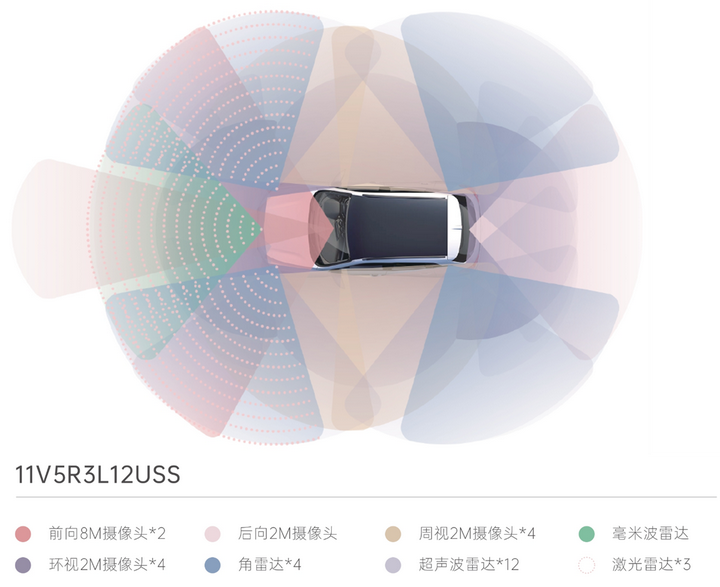
实现高速NOA的方案也比较多。典型的方案是11V5R12U,或10V5R12U即在5V5R12U的基础上,再增加一颗(或两颗)前视摄像头(长焦/主视)、一颗后视摄像头和四颗周视摄像头。
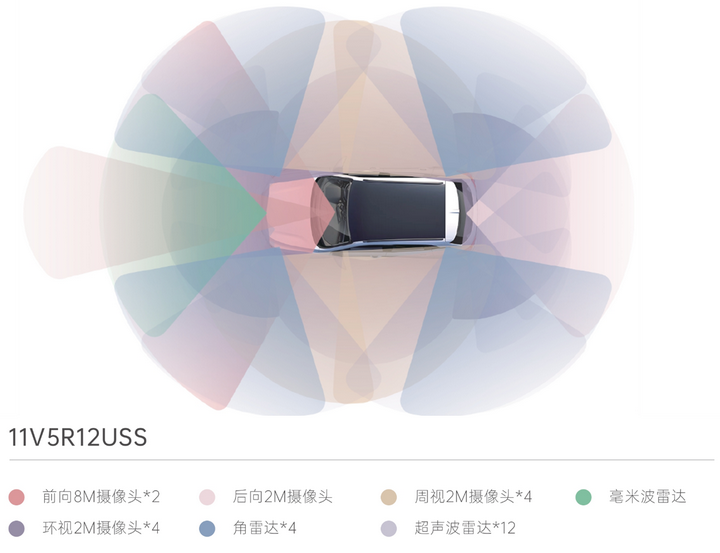
图片来自佑驾创新Minieye官网[9]
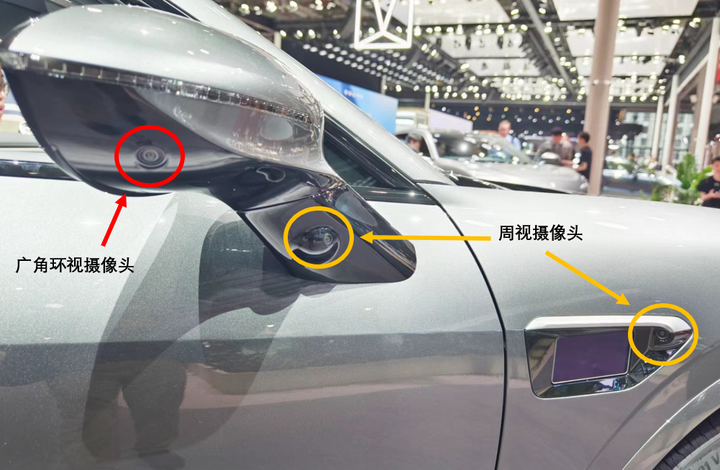
其中,周视摄像头一般放置在前翼子板或者转向灯下方,用于进一步增强侧向盲区感知、对车辆加塞进行感知等等。例如,下图是我在上海车展上拍的阿维塔11的摄像头布置。类似的摄像头布置在哪吒S、小鹏P7i等车型上都有应用。
但是就像我前面提到的,传感器方案不是绝对的。比如吉利博越L使用6V5R12U(没有布置周视摄像头)的方案也实现高速NOA.
目前市场上量产实现城市NOA、或者对城市NOA进行了硬件预埋的车型,典型比如蔚小理、华为智选等等的车型,在实现高速NOA的传感器配置基础上,又加装了激光雷达。不过有的比如蔚来ET7、理想L9等使用了一颗前向激光雷达、装在前侧正面上方;小鹏P7i使用了两颗激光雷达,装在前保两侧;阿维塔11装了三颗激光雷达,分别位于正面和左右翼子板。
图片来自佑驾创新Minieye官网[9]
激光雷达这东西我没实际上手玩过,说实话不了解为什么非得加激光雷达。据我所知现在各家激光雷达厂商都在血亏硬着头皮卖激光雷达给这些主机厂,分明是不可持续的。
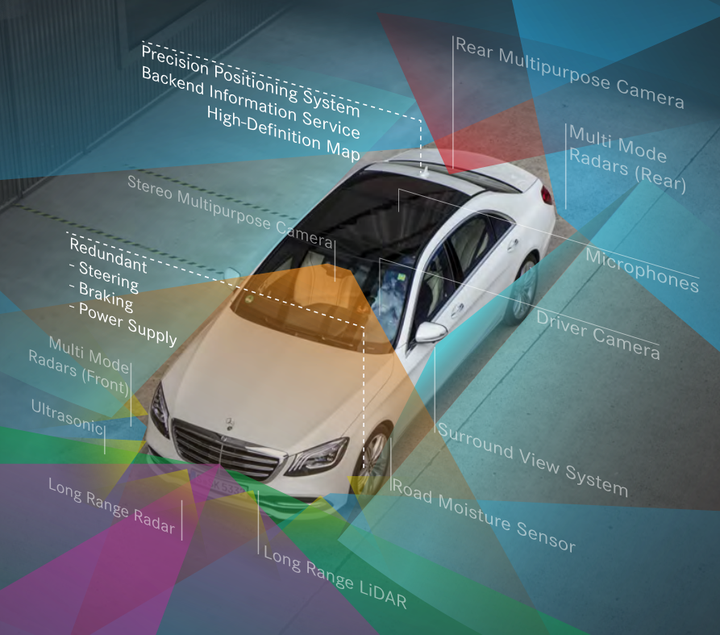
实现L3自动驾驶的瓶颈不在传感器。以上的传感器配置很多都是可以满足L3需求了。事实上,奔驰DRIVE Pilot的传感器布置是6V5R12U[10],还不如国内很多车型丰富。当然,奔驰DRIVE Pilot也不支持城区NOA。
总结一下,根据实现不同辅助驾驶的功能,传感器配置有很多种方案。为了展示明晰,我们有如下几类典型的传感器配置:
表2.典型传感器配置
前面说完了实现不同辅助驾驶功能需要的传感器配置。很显然,不同的传感器配置所需要的处理算力也是不一样的。按照前面对辅助驾驶功能的分类逻辑,对应到传感器方案,我们可以延续将域控制器的算力需求归纳成几类:
1V1R/1V3R/1V5R方案:最少需要4-5 TOPS算力;
5V5R12U方案:最少需要5-10 TOPS算力;
11V5R12U方案:这就不好说了,各家差异很大,一般需要十几到一百多TOPS算力;
11V5R12+激光雷达方案:业内一般认为最少需要150TOPS算力;
这个不好说,这篇文章就不讨论了。
有了以上这些基本的概念,自动驾驶域控制器即可依此进行芯片选型了。为了获得相应算力,设计自动驾驶域控时可以选择:
由多个低算力芯片叠加获得所需算力;
直接选择单个中高算力芯片获得所需算力。
当然,实际芯片选型要考虑的事情比这个多得多得多,限于篇幅这里不展开。那么现在市面上有哪些自动驾驶芯片呢?这又是一个卷得让人怀疑人生的市场:
表3. 常见自动驾驶芯片汇总
| 序号 | 公司 | 芯片 | 算力 | 制程 | 量产时间 |
|---|---|---|---|---|---|
| 1 | NXP | S32V | 4 | 16 | 2022 |
| 2 | TI | TDA4VM* | 8 | 16 | 2020 |
| 3 | TI | TDA4VH | 24-32 | 16 | 2023 |
| 4 | Mobileye | EyeQ5* | 24 | 7 | 2021 |
| 5 | Nvidia | Xavier* | 30 | 12 | 2020 |
| 6 | Nvidia | Orin* | 254 | 7 | 2022 |
| 7 | 高通 | Snapdragon Ride Flex 系列 | 几十至几百不等 | 5 | 2022 |
| 8 | 安霸 | CV22系列 | 等效算力10-20TOPS | 10 | 2019 |
| 9 | 安霸 | CV3-AD系列 | 等效算力500TOPS | 5 | 2022 |
| 10 | 安霸 | CV72系列 | 多种算力 | 5 | 2023 |
| 11 | 华为 | 昇腾310 | 16 | 12 | 2018 |
| 12 | 华为 | 昇腾910 | 640 | 7 | 2022 |
| 13 | 地平线 | J3* | 5 | 16 | 2020 |
| 14 | 地平线 | J5* | 128 | 16 | 2022 |
| 15 | 地平线 | J6 Family | 数百至一千 | 7 | 预计2024 |
| 16 | 黑芝麻 | A1000L | 16 | 16 | 2020 |
| 17 | 黑芝麻 | A1000 | 40 | 16 | 2020 |
| 18 | 黑芝麻 | A1000Pro | 106 | 16 | 2022 |
| 19 | 寒武纪行歌 | SD5223 | 16 | 不详 | 不详 |
| 20 | 寒武纪行歌 | SD5226 | 400 | 7 | 不详 |
| 21 | 芯驰 | V9P | 20 | 16 | 2023 |
| 22 | 零跑(大华) | 凌芯01 | 4.2 | 28 | 2020 |
| 23 | 超星未来 | 惊蛰 R1 | 16 | 不详 | 不详 |
别看芯片种类琳琅满目,其实“目前”市场占有率高的芯片并不多,基本就是我在表中打了星号的这几款:TDA4,EyeQ5,Xavier,Orin,J3和J5。当然,未来这个市场是什么情况不好说。
从表中,我们可以粗略地把自动驾驶芯片按算力分成几个市场:
中低算力市场:十几TOPS以下,主打一个性价比。主要玩家是地平线J3、黑芝麻A1000L、TDA4VM等,互相有很强的可替代性,基本上是杀红了眼的存在;
中端算力市场:大几十到一百多TOPS,包括地平线J5、黑芝麻A1000、高通平台系列芯片等等,这个市场目前地平线J5占据了较大优势,但是高通势头很猛;
高算力市场:Nvidia Orin,目前好像没什么对手。
其他的什么地平线J6系列、黑芝麻A2000、Nvidia Thor之类的超大算力芯片,目前资料太少,不在分析的范围内。
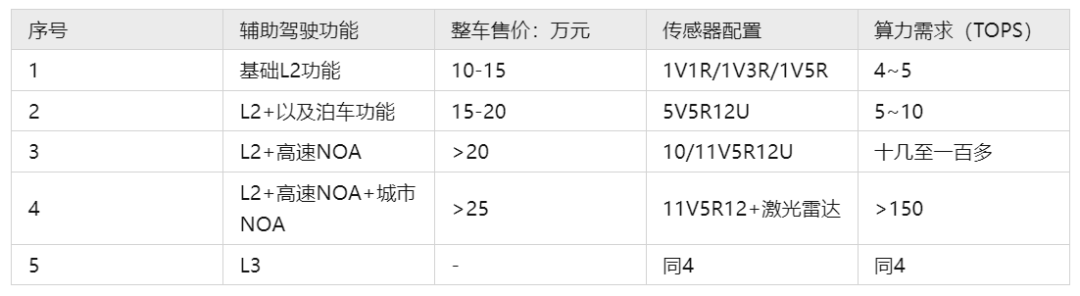
总结一下,根据辅助驾驶功能的丰富程度、对应不同传感器方案,可将域控算力需求进行分类如下:
表4.自动驾驶域控制器典型算力需求
 最前沿的电子设计资讯
最前沿的电子设计资讯

