
作者| 四号线坐不到底
01 引言 乘用车自动驾驶/辅助驾驶按场景分主要包括城区场景、高速场景和泊车场景。三者的对比如下表所示。
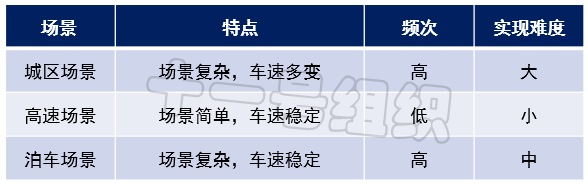
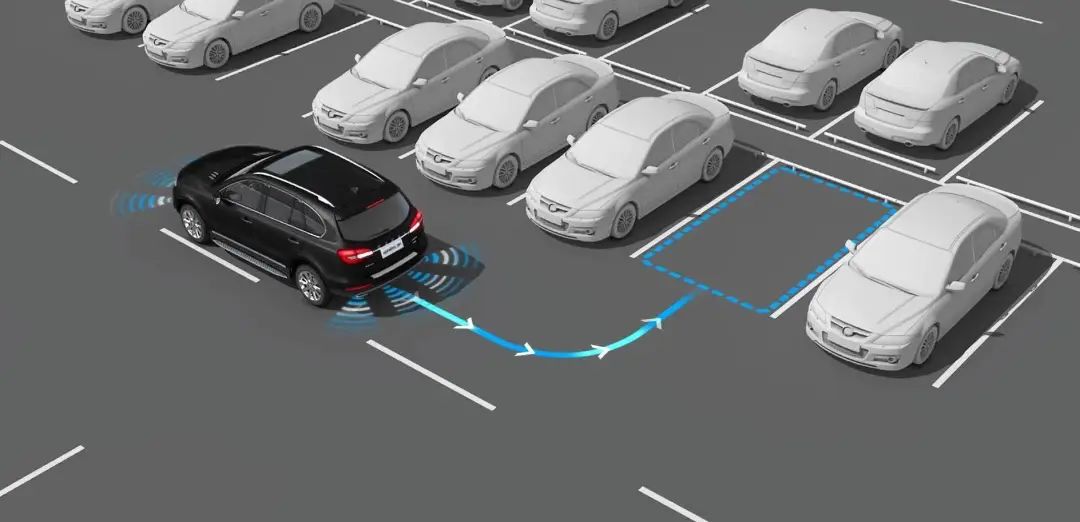
泊车场景是用户面对频次高的场景,其用户痛点感受最深,技术实现难度中等,量产落地机会大,用户买单倾向性高,是主机厂和自动驾驶供应商兵家必争之地。 伴随着驾驶自动化系统内等级的提升,泊车功能从一个辅助的角色逐渐提升至完全自主,传感器配置越发豪华,系统复杂程度不断加深,下图介绍了现在市场上L0~L4级别典型的泊车功能。
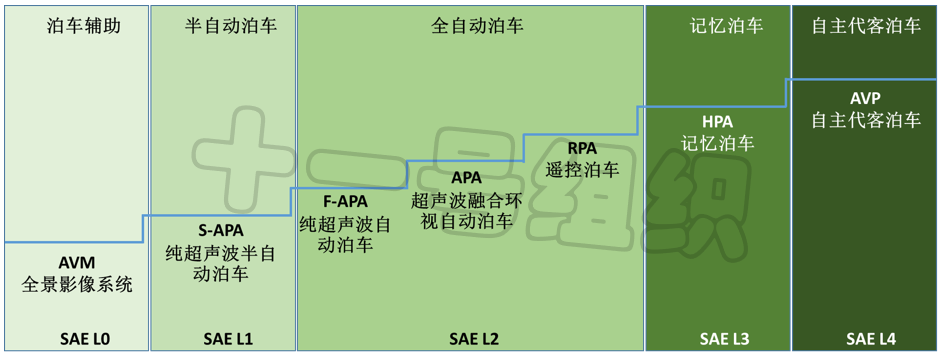
不同L0~L4级别下泊车功能的简单介绍如下表所示。

02 AVM—全景影像系统
全景影像系统(Around View Monitor,AVM),是L0级别的泊车辅助功能。其传感器配置信息如下所示(仅为示例)。
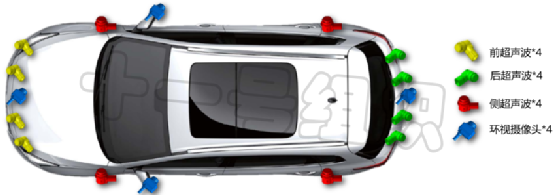
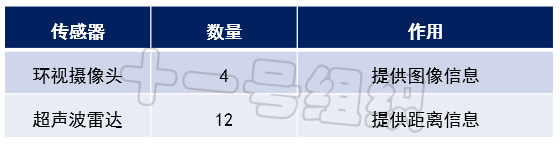
4个环视摄像头分别安装于前后保险杠和左右后视镜上,可以获得180°视野内的畸变图像。通过将4个环视摄像头获得的图像进行去畸变、拼接等处理,获得空中视角的鸟瞰图并显示在中控屏上。同时在传感器探测范围内,对障碍物进行实时检测,并在中控屏上显示。 AVM系统的激活方式有很多种,主要的有:方向盘按键激活、中控按钮激活、语音激活、R挡激活、转向灯激活、方向盘转角激活和障碍物激活等,每种激活方式均需要满足系统的前提条件和触发条件,且每种激活方式显示的AVM界面不完全相同。示例如下表所示:

AVM的主要功能包括:3D环视漫游、鸟瞰图+单侧视图切换、转向视图、3D视图切换、广角视图、放大视图、虚拟开门视图、倒车辅助线、雷达报警、透明底盘。具体功能介绍如下: (1)3D环视漫游:基于AVM开关激活的状态下,在一个点火循环内,第一次通过倒车挡时或者按下全景按键开关第一次进入环视功能时显示,HMI上显示一段环绕车身360度的动画,模拟检查车身四周。3D环视漫游功能的持续时间有限制,而且在执行过程中,可以强制中断。 (2)鸟瞰图+单侧视图切换:系统激活后,将前后左右四个视图融合拼接成一张图片,并以俯视图形式显示在中控上,且显示自车模型。单侧视图切换有前视、后视、左视和右视等4种视图。 (3)转向视图:当方向盘转角大于某个角度或者转向灯激活时,会激活进入转向视图,有左前和右前两种视图。 (4)3D视图切换:系统将车辆模型及周边环境以3D形式显示出来,有3D前视、3D后视、3D侧视和3D转向侧视等4种视图。 (5)广角视图:有前视广角和后视广角两种视图。 (6)放大视图:有前视放大视图和后视放大视图两种视图。 (7)虚拟开门视图:在鸟瞰图上模拟车门的最大开度来保证空间满足驾驶员和乘员的开门需求。 (8)倒车辅助线:有静态倒车辅助线和动态轨迹线两种。静态倒车辅助线衡量了障碍物或者车位线距保险杠的距离,动态轨迹线随着车轮的转动而变化。 (9)雷达报警:当车辆距离障碍物较近时,显示与周边障碍物的距离信息,并以颜色标识以及声音区分。 (10)透明底盘:环视摄像头捕捉前方道路视图,将前后左右视图拼接起来并以透明底盘效果显示。 AVM可以通过驾驶员主动关闭,也可以在满足一定条件情况下退出:

现阶段,AVM的图像清晰度已经足够,比之前的倒车影像功能的用户友好度大大提升,而且,功能已经下放至10W级别车辆,未来极有可能成为标配功能。但是存在雷达报警滞后,图像畸变过大等不足。
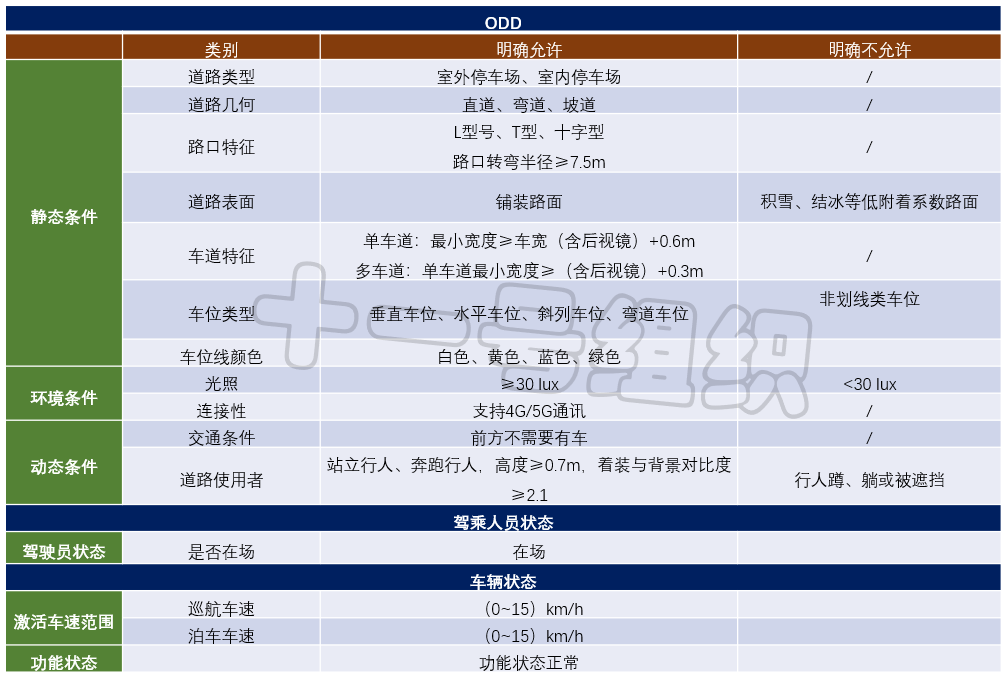
03 APA--自动泊车 自动泊车(Auto Parking Assist,APA),是L2级别的泊车辅助功能,通过精确的车辆定位和控制系统控制车辆按照选择的泊车轨迹完成泊车。其传感器配置信息如下所示(仅为示例)。 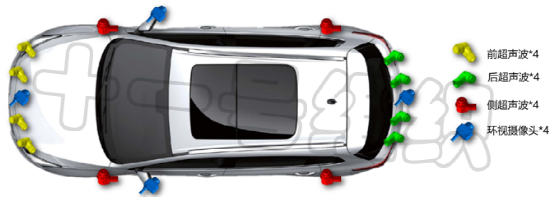

APA系统的激活方式主要有:HMI按钮激活、方向盘物理按键激活、语音激活和AVM切换APA按钮。 主要子功能包括车位搜索、车位泊入和车位泊出。 APA-车位搜索:功能在行车挡/倒车挡均可使用,在满足车速、光照、天气等ODD时,可对搜索白名单(水平车位、垂直车位、斜列车位等)内的车位进行搜索并检测车位内的白名单障碍物(锥桶、他车、地锁等),然后将车位类型(可泊入、不可泊入等)进行分类并显示在HMI上。 APA-车位泊入:功能在检测到有可泊入车位的基础上,基于车位类型(水平车位、垂直车位、斜列车位等)和自车-车位位姿,决策车头/车尾泊入(平行车位仅支持车尾泊入)。用户通过HMI触发APA-车位泊入功能。 APA-车位泊出:功能支持自车从不同方向泊出,垂直车位/斜列车位中,自车可从车头前、左、右方向泊出,水平车位中,自车可从车头左前/右前泊出。 具体功能ODD如下表所示:
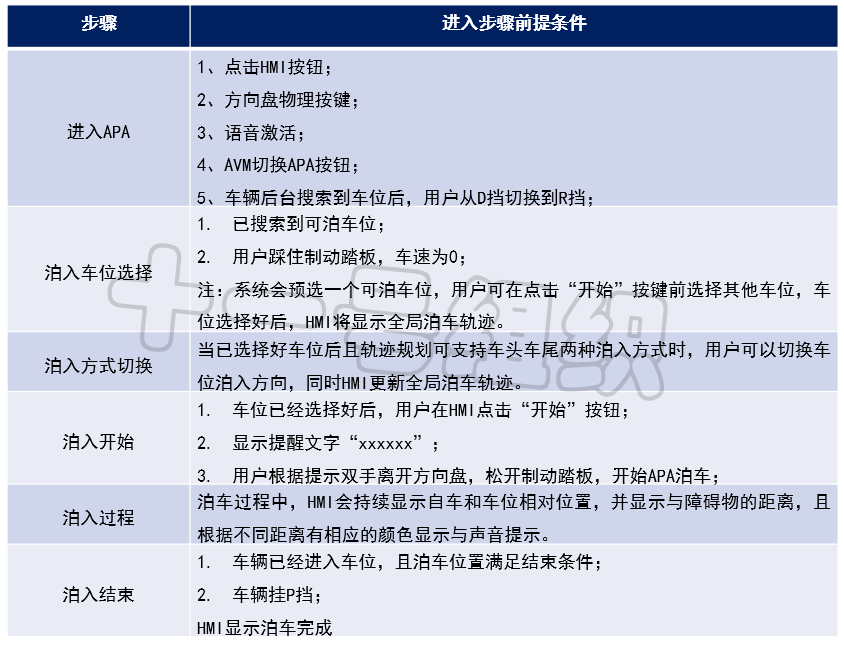
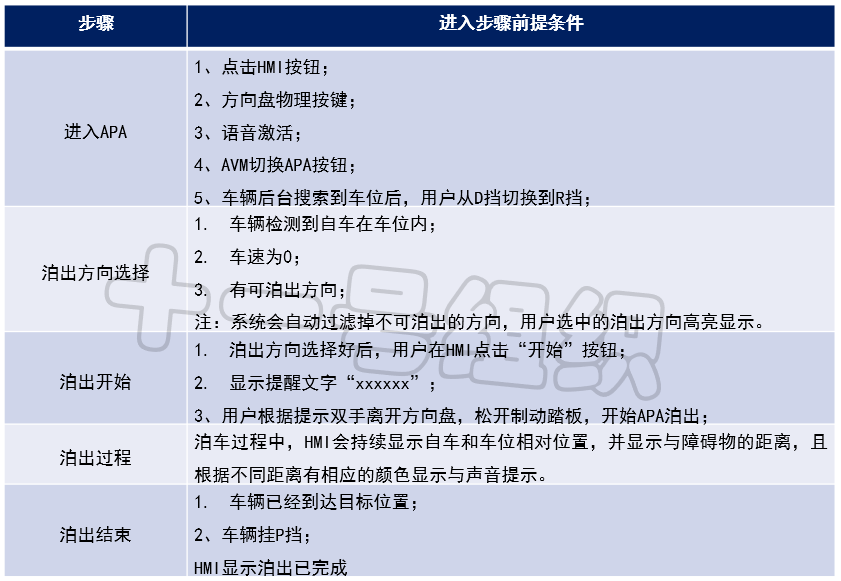
APA泊车-车位泊入具体流程如下表所示:
APA泊车-车位泊出具体流程如下表所示:
当车辆遇到以下情况时,APA泊入/泊出过程会暂停,暂停时车辆会挂P挡且中控HMI会出现“继续”按键,用户可点击“继续”按键恢复任务。具体情况如下: (1)驾驶员踩制动踏板; (2)驾驶员干预挡位; (3)驾驶员解开安全带; (4)车辆被障碍物逼停超过一定时间; (5)外后视镜被折叠。
当车辆遇上以下情况时,APA泊车任务会取消。具体情况如下:
(1)暂停状态超时;
(2)暂停状态下切换挡位;
(3)驾驶员干预方向盘;
(4)驾驶员干预加速踏板;
(5)四门两盖开启;
(6)APA系统故障或关联系统故障。
04 RPA--远程/遥控泊车
远程/遥控泊车(Remote Parking Assist,RPA),又称遥控泊车,包括子功能包括遥控泊入,遥控泊出。RPA同样是L2级别的泊车辅助功能。但是RPA相较于APA的区别在于:驾驶员可在车外进行泊车过程。RPA针对狭窄车位等场景驾驶员无法上车进行泊入泊出的场景能很好的切入用户痛点并解决痛点,提升用户体验度。
其传感器配置信息如下所示(只是其中一种配置)。 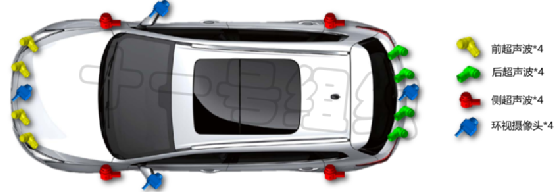

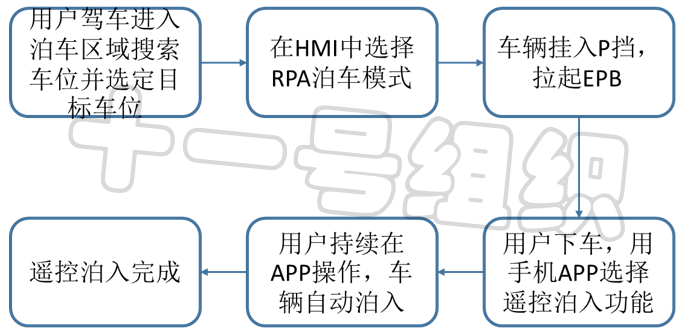
RPA基于手机蓝牙与车端蓝牙连接,通过手机APP端控制车辆进行遥控泊入泊出等操作。RPA功能开启条件主要有:在HMI或者手机APP选择RPA泊车模式;手机蓝牙与车端蓝牙建立连接。 RPA-遥控泊入功能,在检测到有可泊入车位的基础上,用户在HMI选择目标泊入车位并启动RPA功能,将车辆挂入停车挡,下车后用户在车旁,通过手机APP/车钥匙控制车辆自动完成后续泊车过程。 RPA泊车过程中,用户可以通过手机APP监测泊车过程,并通过按钮暂停/恢复/取消泊车,系统根据用户控制信息进行相应的处理。RPA泊入过程中,若用户通过中控点击暂停/恢复/取消泊车,手机APP和系统退出RPA,驾驶员可上车接管泊车,也可上车后通过APA继续自动泊车过程。RPA泊入结束后,双闪/APP提示用户泊入结束。具体流程图如下。
RPA-遥控泊出功能,用户通过手机APP与车辆蓝牙连接,实现远程唤醒车辆,并控制车辆自动泊出车位,系统提供可成功泊出的方向供用户选择。具体流程图如下。

RPA泊出过程中,用户可以通过手机APP监测泊车过程,并通过按钮暂停/恢复/取消泊车,系统根据用户控制信息进行相应的泊车处理。RPA泊出结束后,双闪/APP提示用户泊出结束。
当车辆遇到以下情况时,RPA泊入/泊出过程会暂停,暂停时车辆会挂P挡且手机APP会出现“继续”和“退出”按键,用户可点击“继续”按键恢复任务或者点击“退出”退出RPA功能。具体情况如下: (1)驾驶员点击“暂停”; (2)车端被干预(如制动踏板、外后视镜被折叠); (3)蓝牙连接异常; (4)车辆被障碍物逼停超过一定时间; (5)APP泊车界面被切换(如接电话,打开其他APP)。 当车辆遇上以下情况时,RPA泊车任务会取消。具体情况如下: (1)暂停状态超时; (2)驾驶员点击“退出”按键; (3)驾驶员接管; (4)RPA系统故障或关联系统故障。 05 HPA--记忆泊车
记忆泊车(Home-zone Parking Assist,HPA),或者叫记忆泊车辅助(Home-zone Parking Pilot,HPP),在某些特定场景下,可代替用户将车停入指定车位中。在泊车过程中,用户不需要停留在车内,出于安全考虑,用户需要停留在车辆一定距离范围内,通过手机APP监控车辆实时运行状态,以保证在必要的时候能采取制动等安全操作,确保车辆完成泊车操作。主要子功能包括自建地图、车辆定位、记忆泊入和记忆泊出。
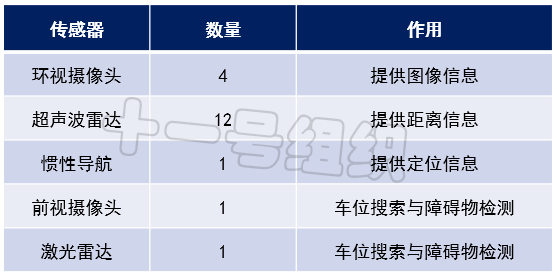
用户初次驾驶车辆时,车辆通过自身传感器学习、记录并储存用户常用的下车位置、停车地点及泊车行进路径。然后当用户驾车再次到达记录的下车位置时,车辆自动提醒用户可以下车并由车辆自主泊入车位。用户在车内同意确认启用此功能后,用户下车并用手机APP触发车辆自主代客泊车功能,此时由车辆负责行车安全,车辆具有自己避障和绕行功能并实时反馈车辆运行状态和泊车状态到驾驶员遥控设备上。车辆完成泊车后,通过遥控设备通知驾驶员泊车结束。 其传感器配置信息如下所示(只是其中一种配置):
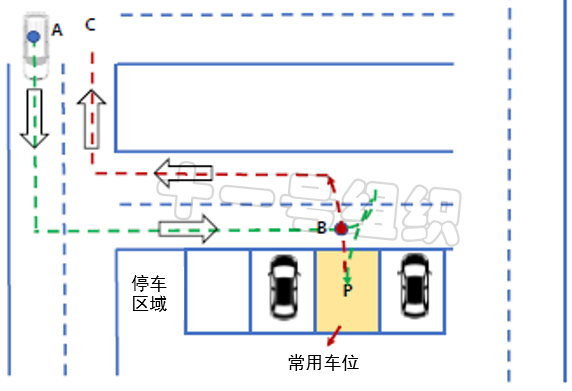
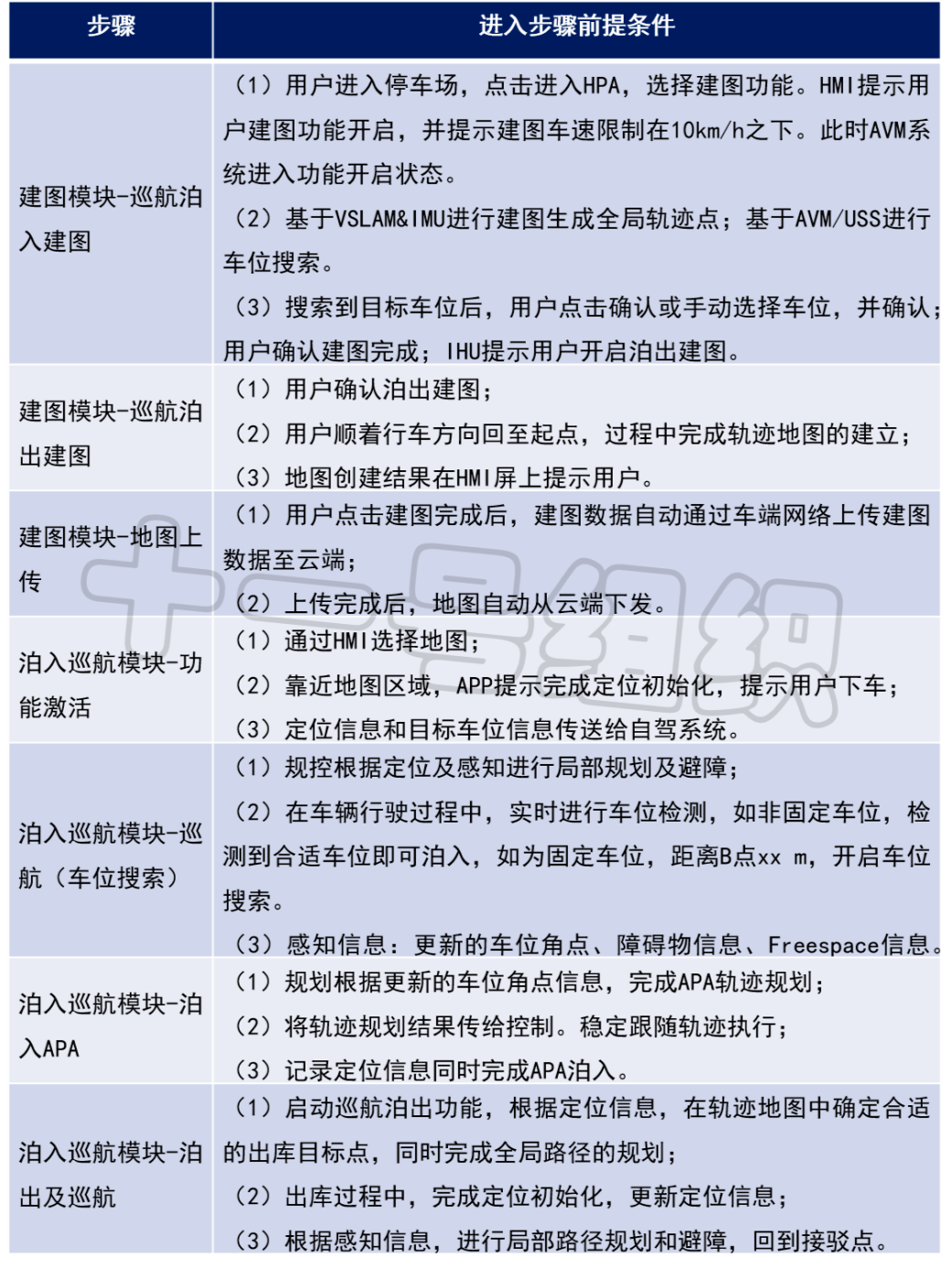
HPA泊车过程如上图所示,主要分为两个阶段,路线学习建图阶段和路线回放自主泊车阶段。 路线学习阶段:通过摄像头获取的图像信息,生成A->B->P->C的环境特征地图等相关信息。系统会提醒路线学习是否成功。 自主泊车阶段:车辆在起点范围内实现重定位。从A规划一条到B点的路径,路径生成提示用户,用户确认后,车辆自动驾驶至B点,达到B点后,车辆规划轨迹,泊车入位至P。召唤车辆时,可自主泊出并巡航至召唤点。 HPA主要功能模块介绍如下表所示:
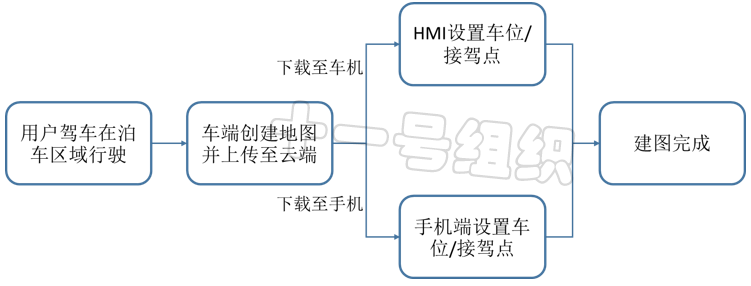
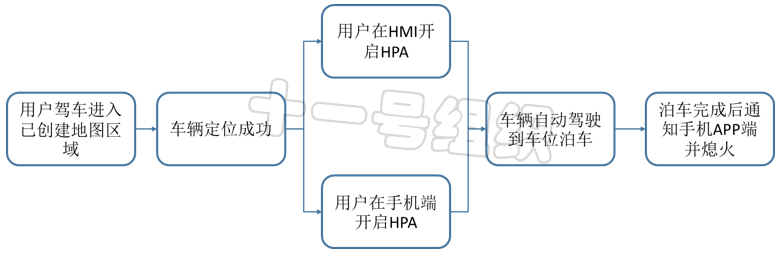
HPA创建地图流程图:
HPA泊入流程图:
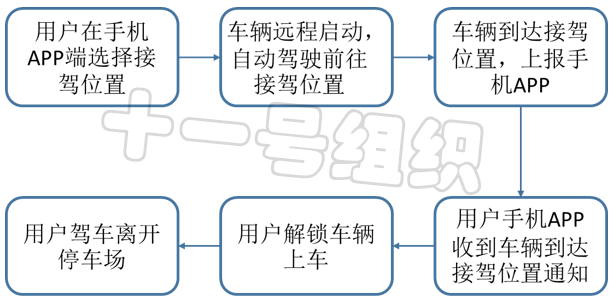
HPA接驾流程图: 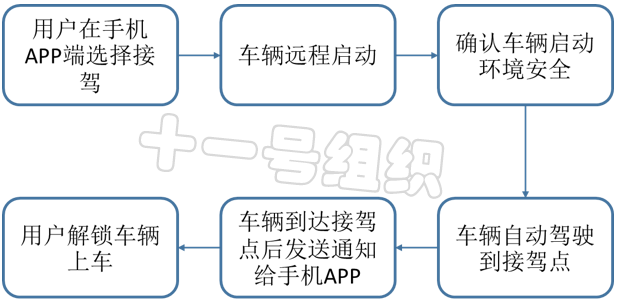 06 AVP--代客泊车
06 AVP--代客泊车
自主泊车系统/代客泊车系统(Automated Valet Parking,AVP),是基于高精地图,通过车端的传感器来感知周围环境和定位,在停车场内、停车场外以及园区自动规划行驶路径,进行自动搜索车位、自动泊入/泊出车库,以及远程接驾;同时可以通过手机APP端/钥匙端,可以进行远程操控和实时监测。
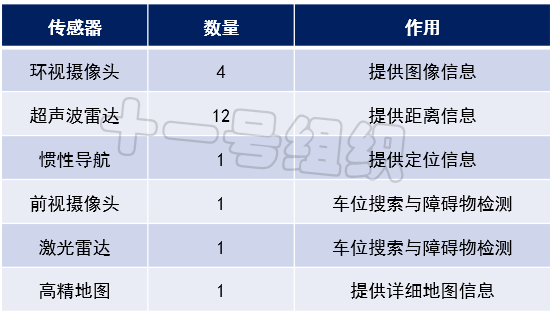
其传感器配置信息如下所示(只是其中一种配置):
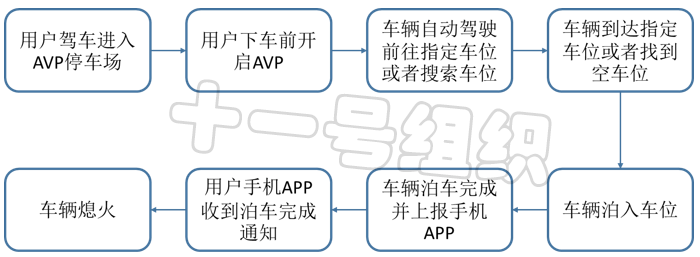
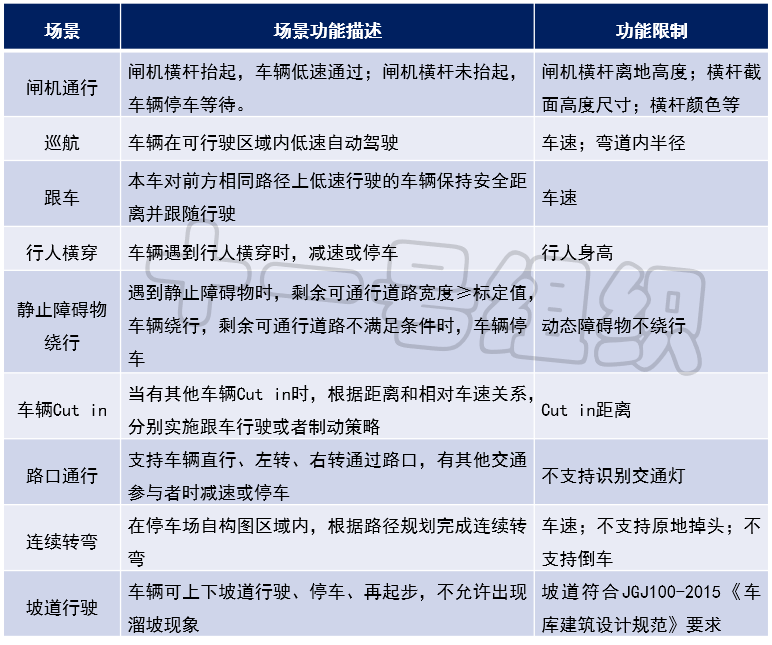
AVP的基本功能包括: (1)AVP构图:在无自构图数据的停车场区域内,通过车端传感器建图; (2)AVP泊入车位:在有自构图数据的停车场区域内,车辆低速自动驾驶到驾驶员选定的目标车位或者自己寻找空车位并自动泊入; (3)AVP接驾:在有自构图数据的停车场区域内,车辆自动泊出车位并低速自动驾驶到驾驶员选定的目标位置。 停车场自构图区域内的低速自动驾驶能完成以下动作:低速巡航、跟停/起步、路口通行、上下坡道、停障/绕障、闸机通行等。 AVP泊车流程图:
AVP接驾流程图:
AVP构图主要包括了自构图创建及分享和自构图众包。 AVP-自构图创建及分享:自构图信息包括停车场内道路信息和车位信息。在符合ODD要求的停车场,车辆自动进行/用户通过HMI手动触发创建自构图。车端以停车场为单位保存/管理所创建的自构图,并在法律合规时,将车端自构图上传至云端共享。 AVP-自构图众包:在法律合规时,车端自构图可被上传至云端进行共享,云端对各车辆上传的同一停车场自构图进行分析融合,生成云端自构图,可供初次驶入此停车场的车辆下载使用,在一定条件下会触发车辆车端自构图更新。 在有停车场自构图的区域内,AVP有如下典型应用场景:
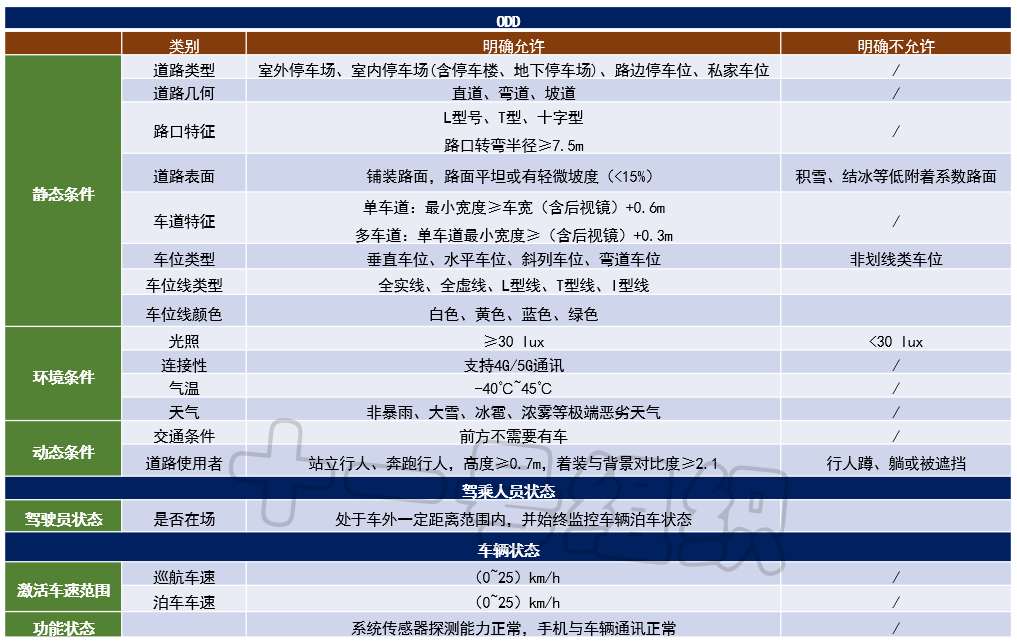
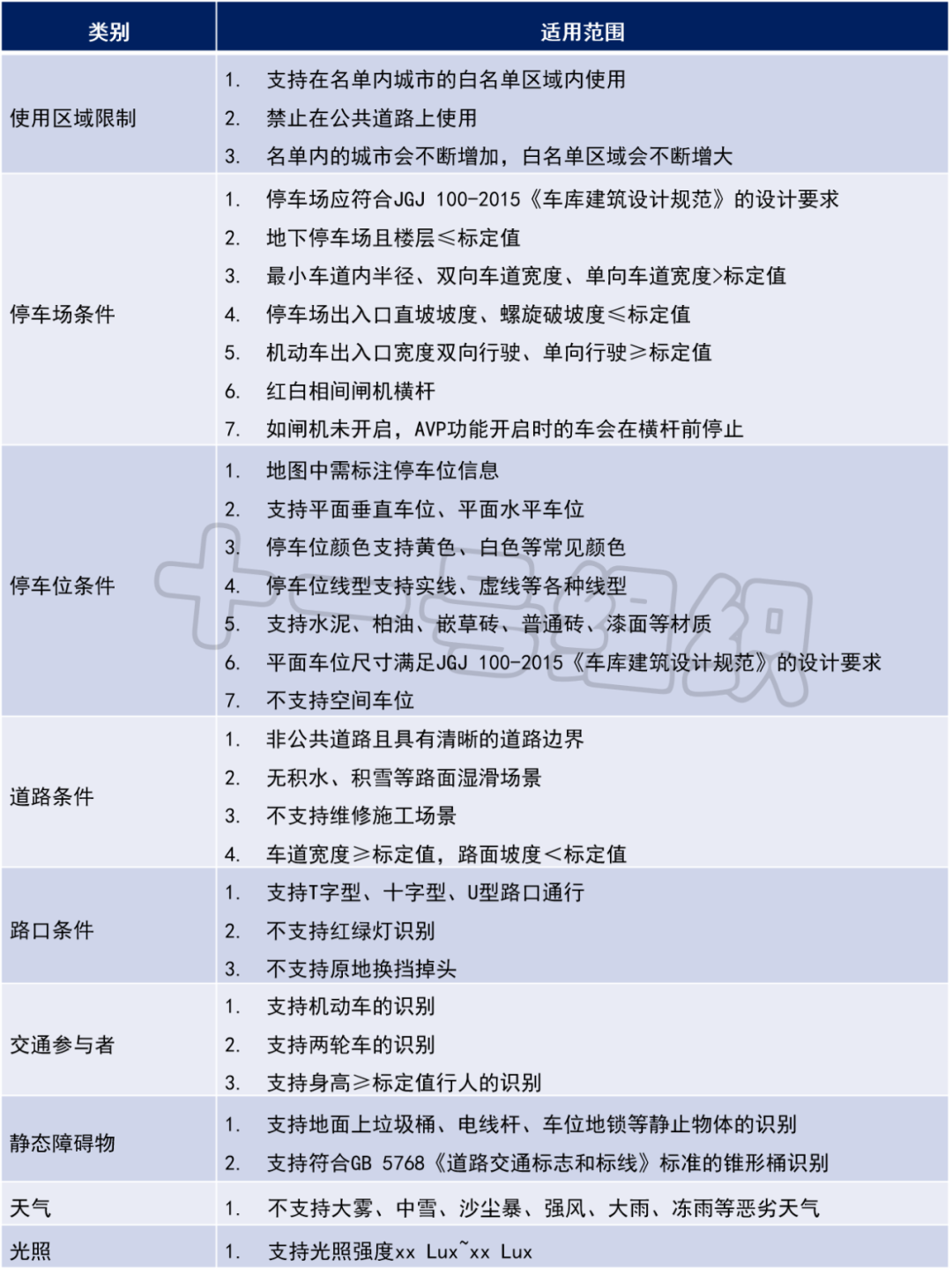
AVP功能适用范围:
AVP功能在巡航阶段不支持暂停,在泊入/泊出车位时可以暂停,暂停条件参考APA&RPA的暂停条件。 当车辆巡航时遇到以下情况时,AVP任务会取消。具体情况如下: (1)车辆遇到障碍物车速降为零且超时; (2)驾驶员干预挡位; (3)驾驶员干预加速踏板; (4)驾驶员干预方向盘; (5)驾驶员干预制动踏板; (6)驾驶员解开安全带; (7)外后视镜被折叠; (8)四门两盖被打开; (9)AVP界面被关闭。 07 结语
前文介绍了泊车L0-L4级别中代表性的功能,在现阶段,自动泊车的种类比较多,技术也越发成熟,大多数情况下车辆的自动泊车功能的确能帮助用户更快的泊车入库,解决用户泊车难的痛点,减少剐蹭发生的机率,提高用户驾驶幸福感。
但是需要注意的是,自动泊车往往后面会跟着辅助二字,辅助辅助,只能起帮助的作用,现如今自动驾驶的corner case解决进展缓慢,用户驾驶车辆时,总会遇上那些没有车位线、天气极端恶劣等情况。此时,打铁还需自身硬,用户本身的驾驶水平才是保证车辆安全的下限,用户不能完全相信机器,更不能将气撒给机器。
—END—
 最前沿的电子设计资讯
最前沿的电子设计资讯

