
由于有小鹏和华为两大流量支柱,加上懂车帝等很多的机构参与进来AEB,(Autonomous Emergency Braking)“自动紧急刹车系统”,也成了大家茶余饭后的焦点。不少用户甚至认为,这是一项能够在任何紧急情况下实现自动刹车的智能驾驶功能,客观来说,消费者的这种理解可能导致严重的交通事故。在流量过后,我们希望能够有一些观点和想法提供给大家!

自动紧急刹车系统(AEB)的关键要点:
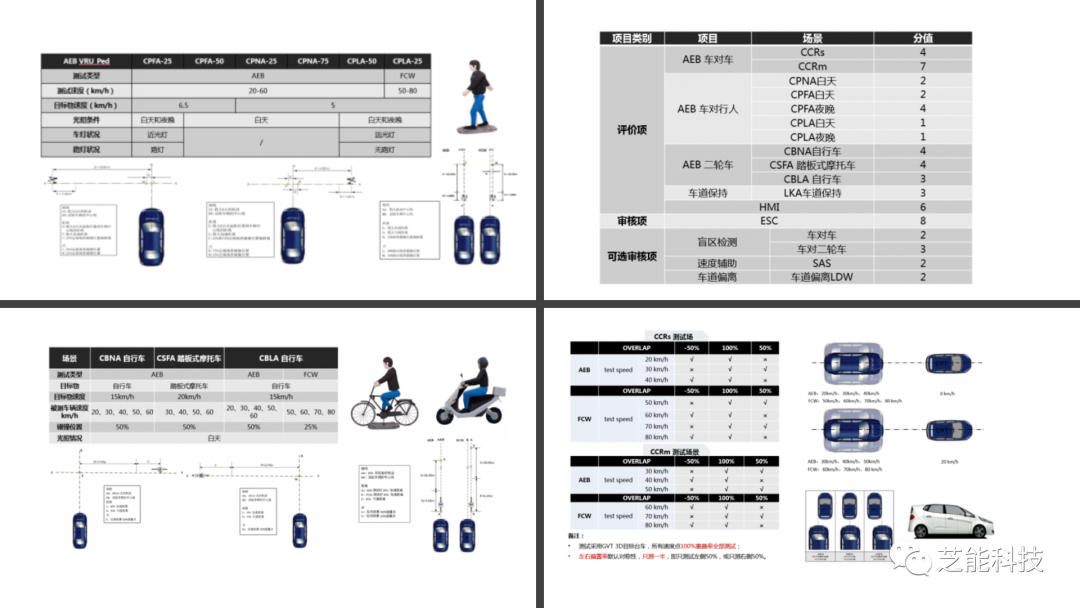
1)紧急刹车并非在任何车速下都能触发,标准法规和各车企的测试,都存在阈值上的差异,所以每台车上的AEB功能上限存在差异,功能启动的车速范围是不同的。AEB只是帮忙的,要在实战中搞清楚并不容易!
2)现有AEB技术对超低速和静止障碍物的感知能力较弱,驾驶员需时刻注意前方道路,紧急刹车是最后一道防线,日常驾驶不能依赖它!能早处理早处理,留着给AEB尝试,比较危险🤣

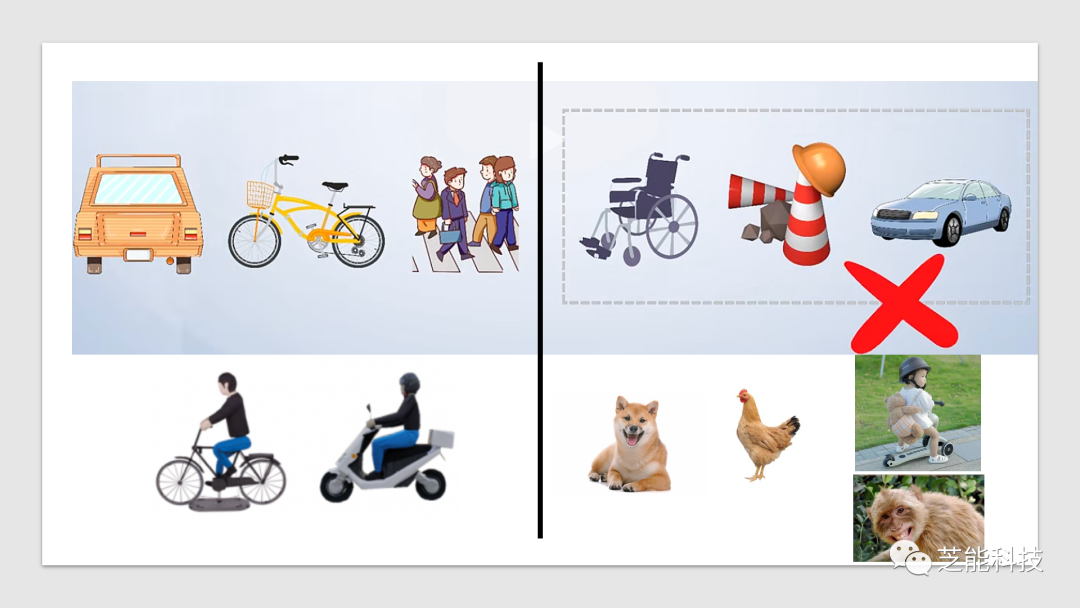
3)不同状态的车,AEB技术对障碍物的探测存在类型限制,能够识别车辆正后方、两轮车和行人等常见障碍物,但对于轮椅、锥桶、侧斜停放的汽车等异形障碍物的触发能力有限。还有AEB的技术层面,是不是使用了更高级的软件形态,特别是开没开智能驾驶,很多状态不一样。这是个卖点,但是对于用户去理解,还需要时间。
4)当然最重要的是,如果你在突然猛踩油门,猜错了,这车的AEB功能将无法触发。智能车辆虽然检测到了障碍物,但是认为你有积极的驾驶意图,能不能搞点花出来,这时候AEB功能就不会被叫唤出来,给你背锅!
现有量产车型的AEB表现,差异较大的原因,最主要是感知传感器和决策算力都有差异,对于AEB功能来说,我们的期望是在恰当时刻做出准确刹车动作的挑战,核心的诉求是AEB误报率要求在十万公里内不大于1次,要既不触发过于频繁,也不能不触发,难度可不低啊!
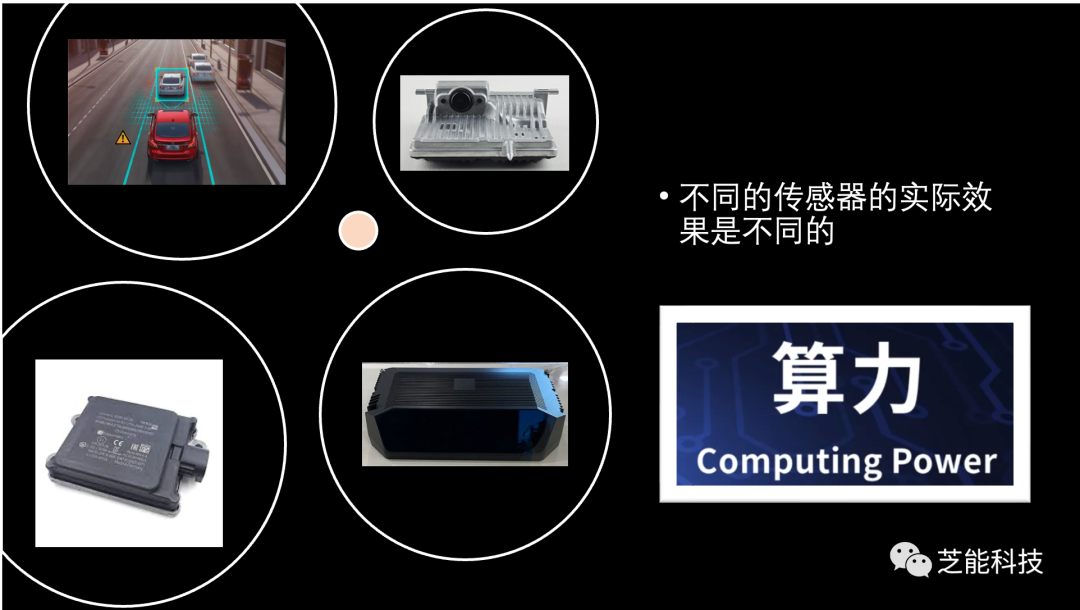
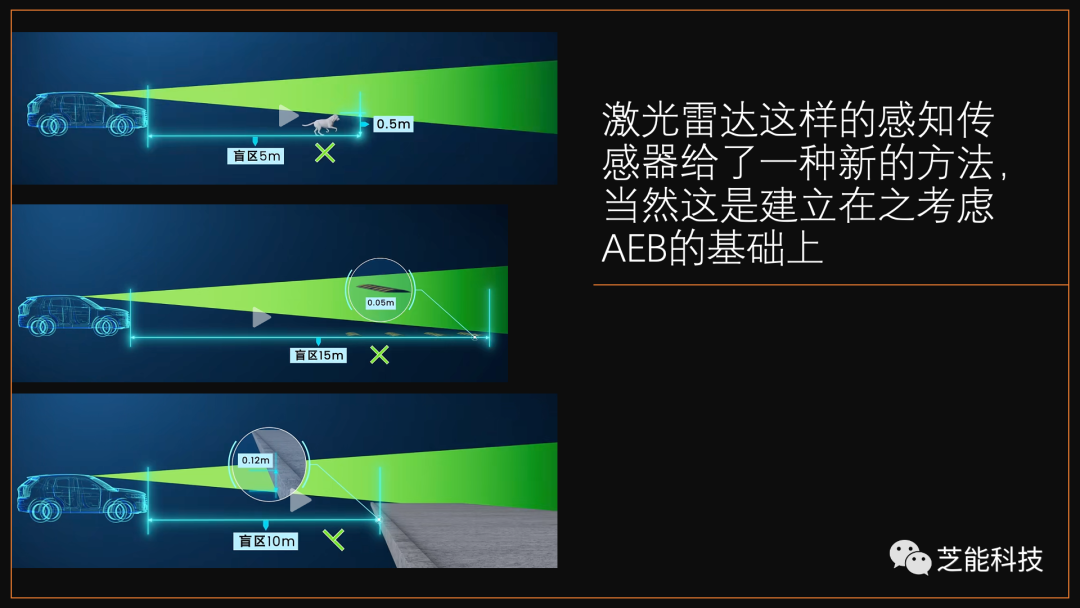
车辆感知能力必须首先识别出目标类型,同时准确识别目标类型的要求极高,AEB对车辆感知能力的要求极其严格,以避免误报。由于现有量产车型的传感器配置各异,视觉或毫米波雷达等单个传感器方案受限于传感器性能,导致AEB功能表现上限不同。多传感器融合感知的AEB功能已有明显进步,尤其是激光雷达参与的AEB功能表现更为卓越。激光雷达使AEB功能能够更丰富地探测障碍物,提高系统对障碍物的准确识别率,从而进一步完善AEB功能。
当然长期来看,智能驾驶核心还是有全局视角,能够在刹车之外就选择合适的路径,避免这个场景,随便来一脚刹车的也不是老司机啊。君子不立危墙,在合适的路径规划下,远离危险,远离隐患,这是最希望做好的事情!
最重要的事情是,随着AI在智能汽车的导入越来越快,越来越有效果,AEB单一的功能将进入历史的舞台!我们围绕智能驾驶将做全面的跟踪和探讨!
 最前沿的电子设计资讯
最前沿的电子设计资讯

