
随着Elon Musk认定特斯拉是家AI和机器人的公司,我们决定单独为Optimus开设一个专题。Optimus代表了商业化人机产品的最快速度和先进技术,值得深入研究。Optimus在短短两年半内迭代了3次,在工作能力、灵活性、静态稳定性和智能水平方面达到了同行先进水平。
特斯拉计划在2025 年出货首批人形机器人Optimus!

由于机器人也是一个很复杂的事,所以我们需要对Optimus的运动控制、感知硬件结构和软件算法进行了拆解和分析。
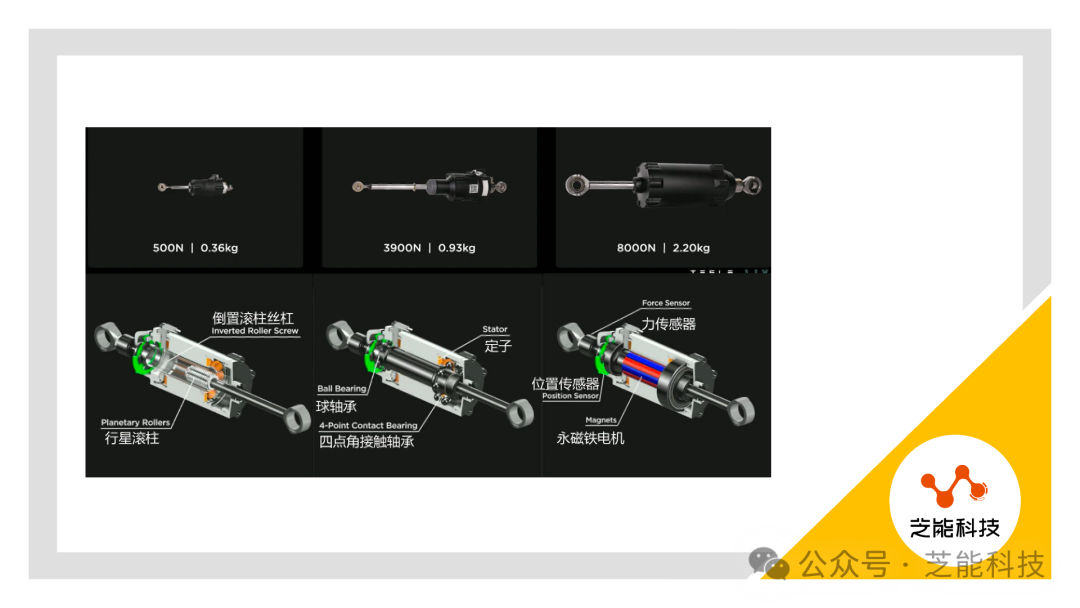
1)运控方面,Optimus的执行器采用刚性驱动器(TSA)方案,包括旋转关节、直线关节和空心杯/灵巧手关节。
2)感知方面采用纯视觉方案(3D多目视觉)和触觉传感器。
3)软件算法,包括环境感知、思考决策和运动控制Optimus在自动驾驶和人形机器人中底层模块的算法复用。
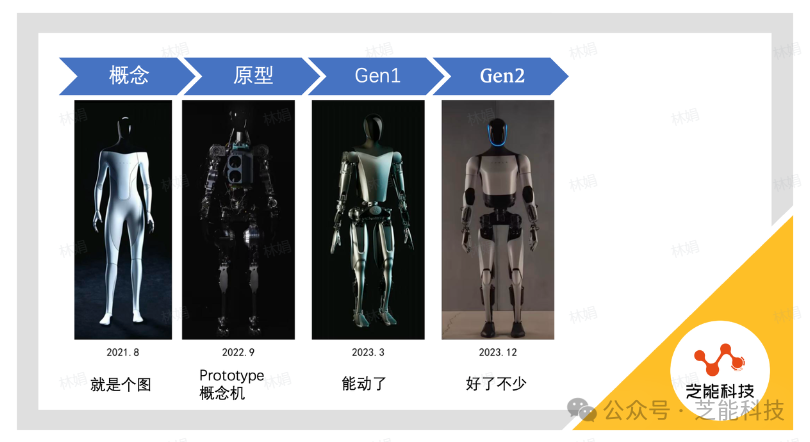
Optimus在短短两年半内进行了3次迭代。
1)2021年8月,特斯拉首次公布人形机器人项目,当时Optimus还是一个概念设想。到了2022年9月的特斯拉AI DAY,Optimus首次亮相,虽未展示实际能力,但通过Demo演示呈现了搬箱子、浇花和在超级工厂工作的场景。
2)2023年3月的Investor Day,Optimus的新视频展示了其能够自由行走、进行拧螺丝等工作。同年5月的股东大会上,特斯拉展示了Optimus的新成果,包括运控能力提升、一定程度的FSD算法复用。到了9月,特斯拉通过社交平台发布了Optimus的进化视频,展示了其自我校准、学习处理多任务、姿态控制和自平衡能力提升。
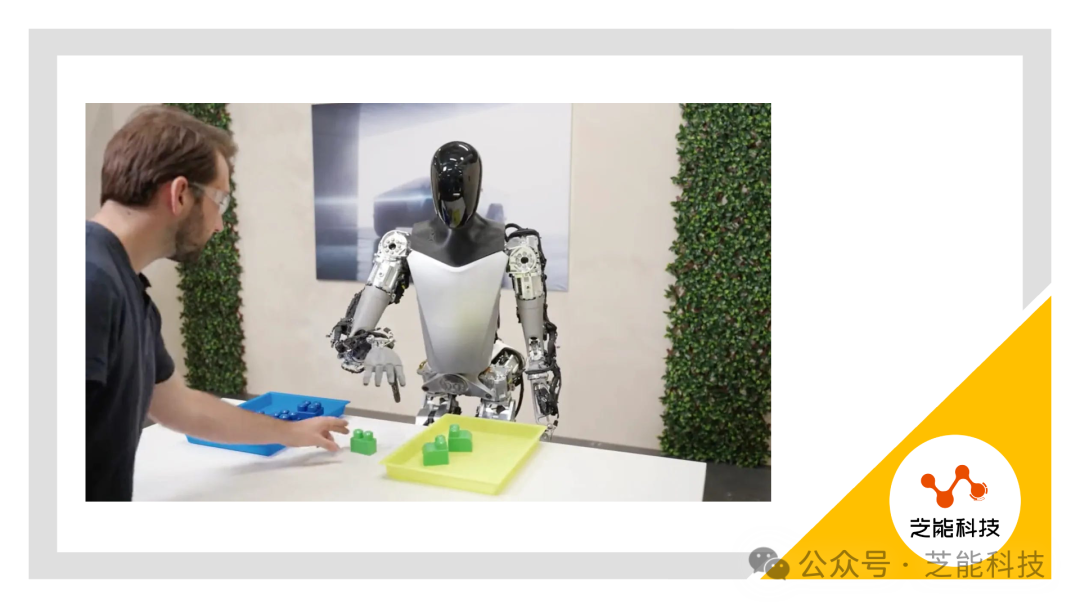
3)2023年12月,特斯拉发布了第二代Optimus人形机器人(Gen2),相较上一代(Gen1)在感知与性能上有大幅改进,包括颈部与手部灵活度增加、整体重量减轻、行走速度提高、手部增加力传感器、脚部仿生设计并增加力传感器等。总体而言,Optimus Gen2在运动能力上表现超出预期,包括手部精细动作、深蹲动作等,展示了强大的运动和质心控制能力。
总体来看,从首次公布人机项目后,特斯拉机器人在硬软件性能上的迭代速度较快,几乎每3-4个月就有新的进展。
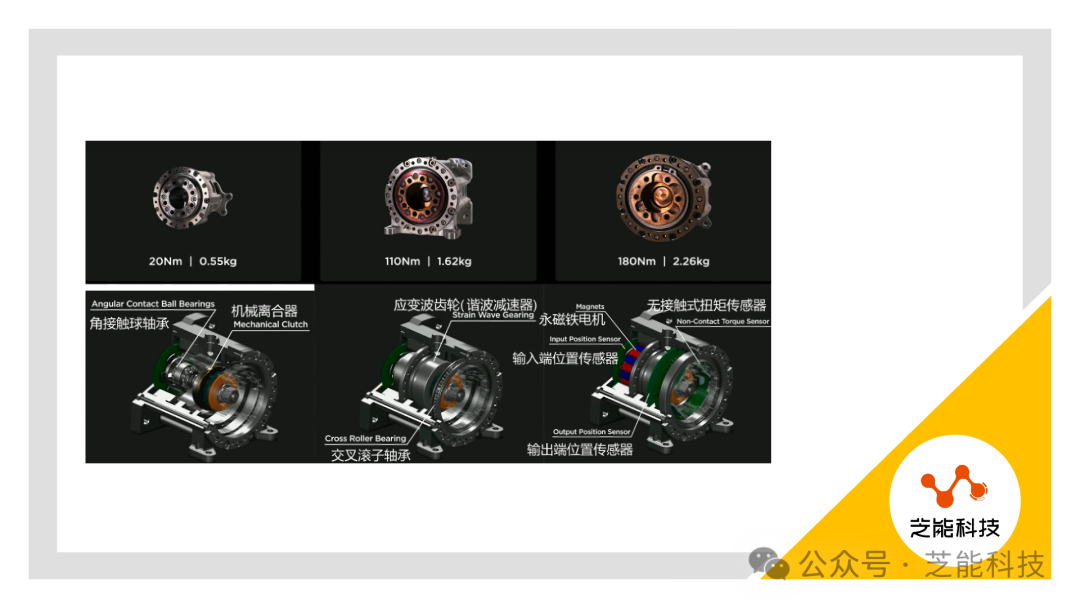
Optimus的迭代主要涉及运控、感知和软件方案。在运控方面,关节执行器是机器人硬件的关键组成部分,负责驱动机器人执行运动。
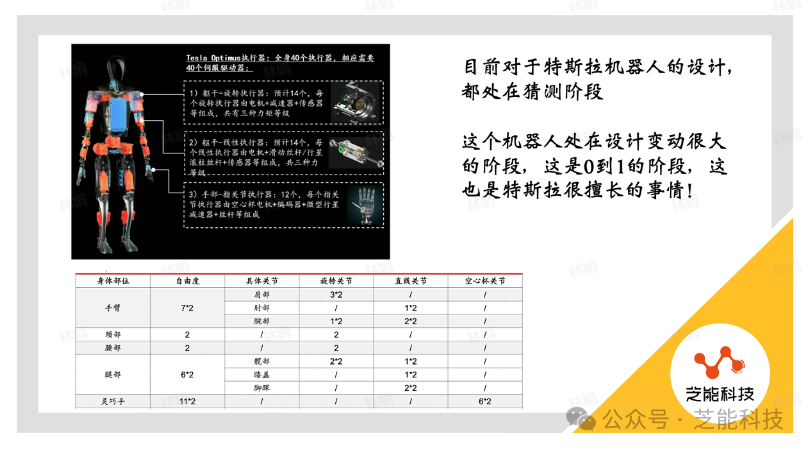
1)执行器包括电机、减速器、编码器、控制板和控制软件等零部件。执行器根据运动类型可分为旋转执行器和线性执行器,其分布在机器人的不同关节上。
2)Optimus人形机器人主要通过配置外部传感器实现感知,其中包括视觉传感器和触觉传感器、多维力传感器。
小结:我们开个头,具体的细节内容,我们会持续追踪。
 最前沿的电子设计资讯
最前沿的电子设计资讯

