
一两周前梳理了最新几家主机厂的电子电气架构,后续有陆续写了几篇,汇总在一起给大家查阅。
01.
小鹏
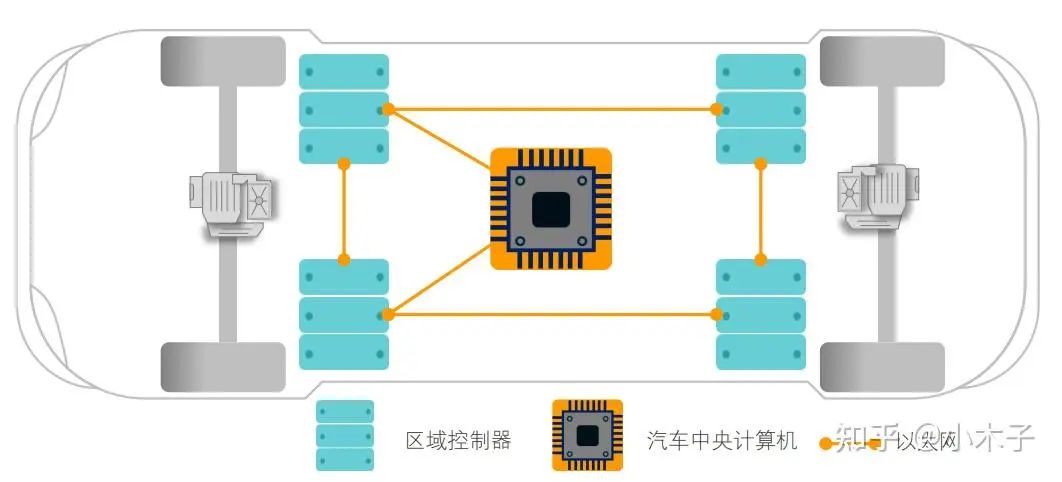
小鹏最新的电子电气架构名叫X-EEA3.0,那年的技术宣传图如图1所示,中央超算(C-DCU)加区域控制的架构,其中中央超算负责车控、智驾、座舱三大功能,区域控制器分为左右两个,将更多控制件分区,并且根据就近配置原则,分区接管相应功能,大幅缩减线束。

▲图1 小鹏X-EEA3.0架构
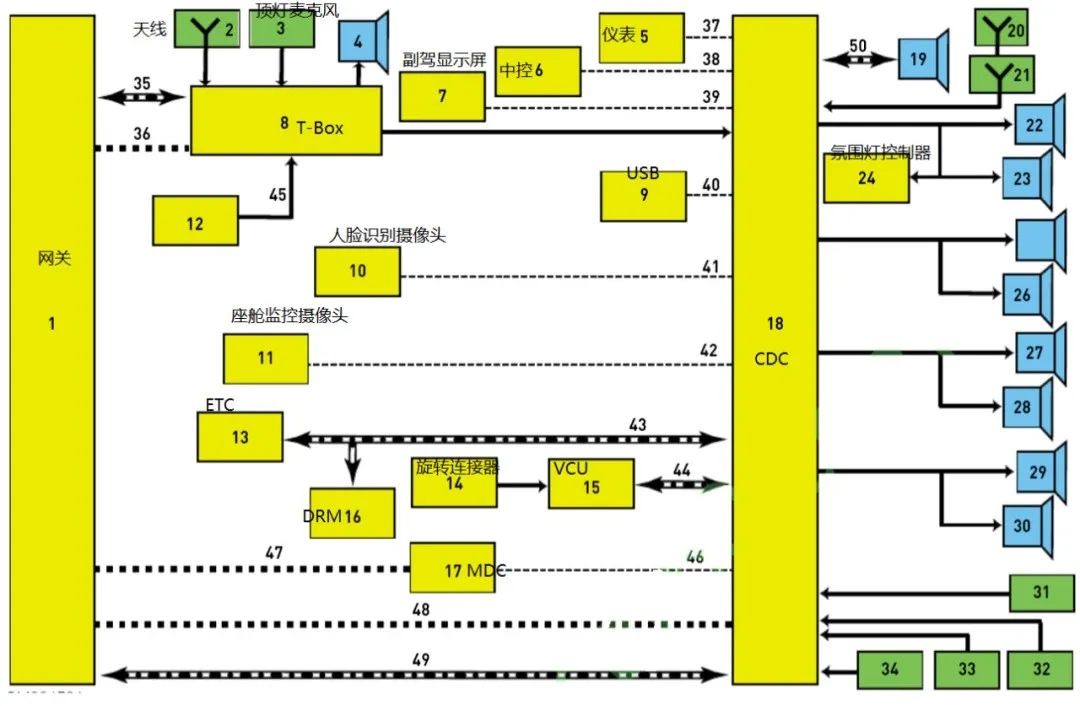
一年后的今天,X-EEA3.0的落地情况如何呢?从最近很火的小鹏G6来看,其网络拓扑如下图所示。
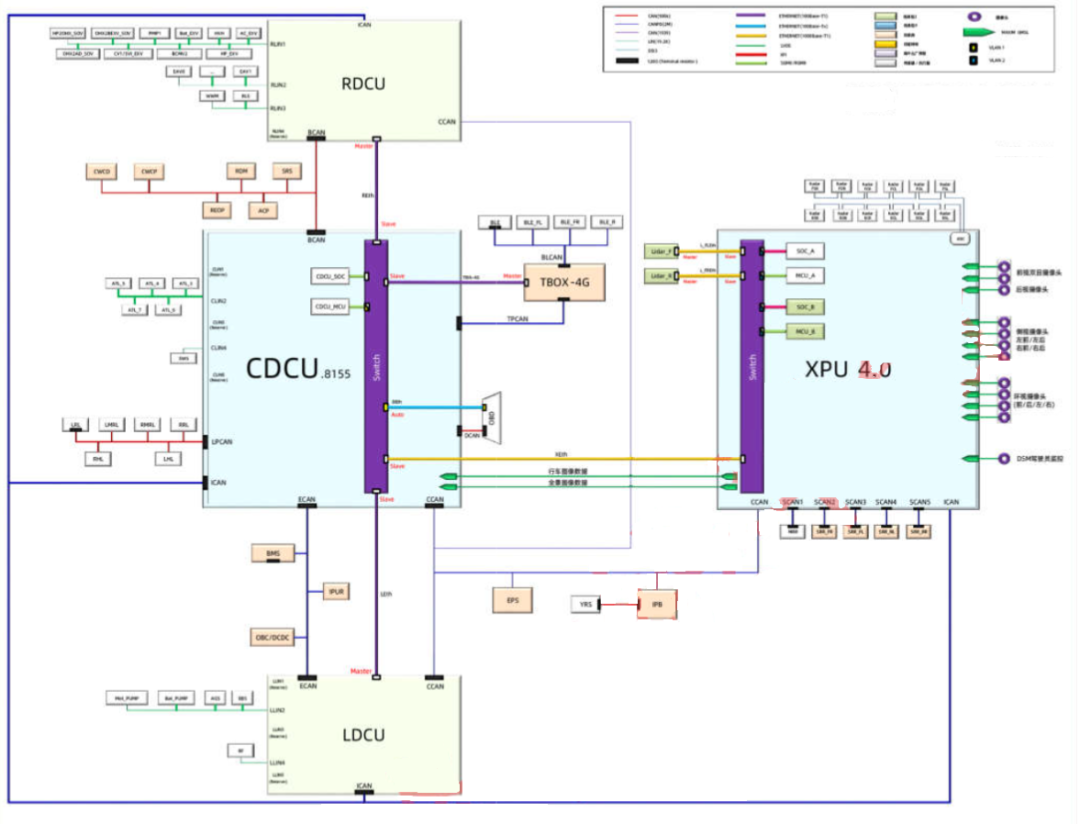
▲图2 小鹏G6的网络拓扑
其中CDCU为图1中的中央超算,但是跟之前宣传的不太一样的是,CDCU宣传是的负责车控、智驾、座舱三大功能,而实际则是仪表显示、中控和副驾信息娱乐功能,以及跨域融合包括中央网关、车外声音控制、外部灯语控制、氛围灯控制和泊车辅助灯功能,其采用的主控为高通的8155。智驾还是单独的XPU负责。
▲图3 中央超算与其他模块的连接
CDCU与XPU以及TBOX之间的通信为1000Base-T1,与LDCU和RDCU以及OBD诊断口之间的为100M以太网。LDCU和RDCU的主控为瑞萨MCU,猜测为RXv3。
02.
蔚来
2022年,蔚来展示了其基于区域控制器的电子电气架构,如下图所示,其中区域控制器负责分布式边缘计算框架、车控仲裁中心、面向服务通信的信息通信网络、区域集中式数据中心、整车配电枢纽。获取智能传感器的数据和控制智能执行器的行为。
▲图4 蔚来的下一代电子电气架构
从2023款ES8来看,中央域控基本是成型了,其主控包括4颗Orin和高通的SA8155,也就是前年在官网上宣传的adam超算平台。
▲图5 蔚来ES8的电子电器架构(来源佐思汽研)
区域控制暂时还没有看见,主要分了几个重要的控制器,包括车身控制器、车辆控制器、柔性底盘控制器,如下是车身控制器、车身网关控制器的接口图。
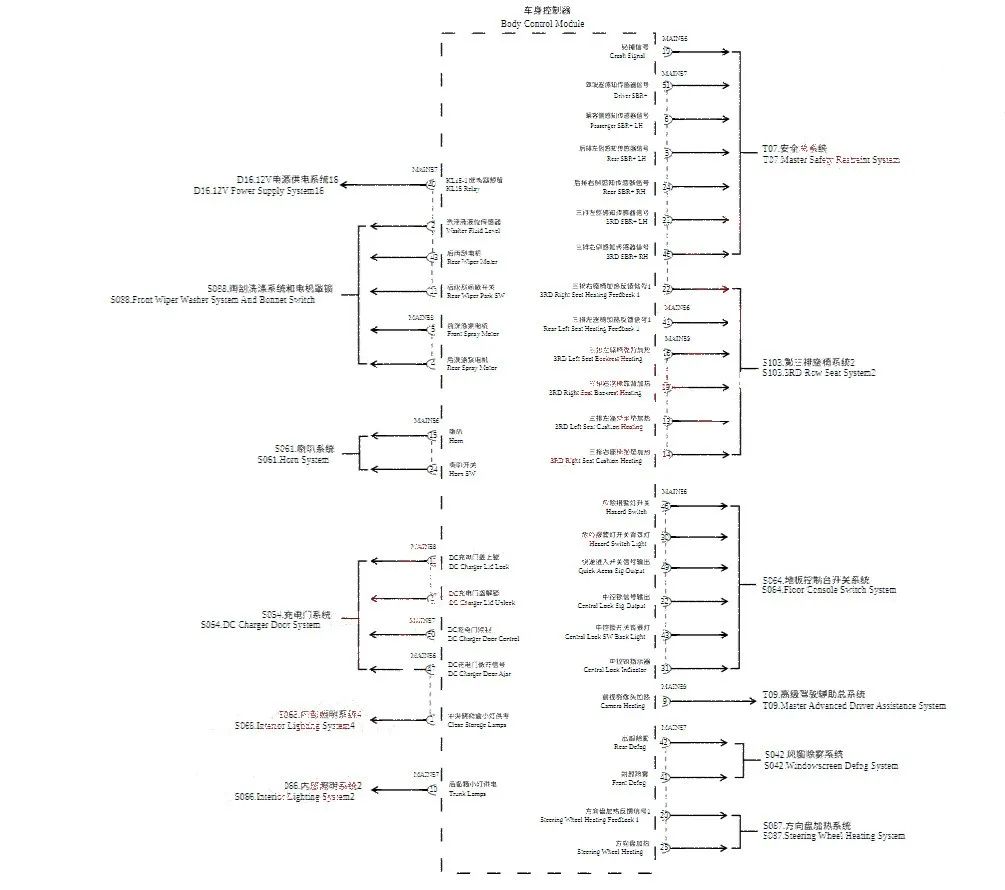
▲图6 蔚来ES8的车身控制器接口图
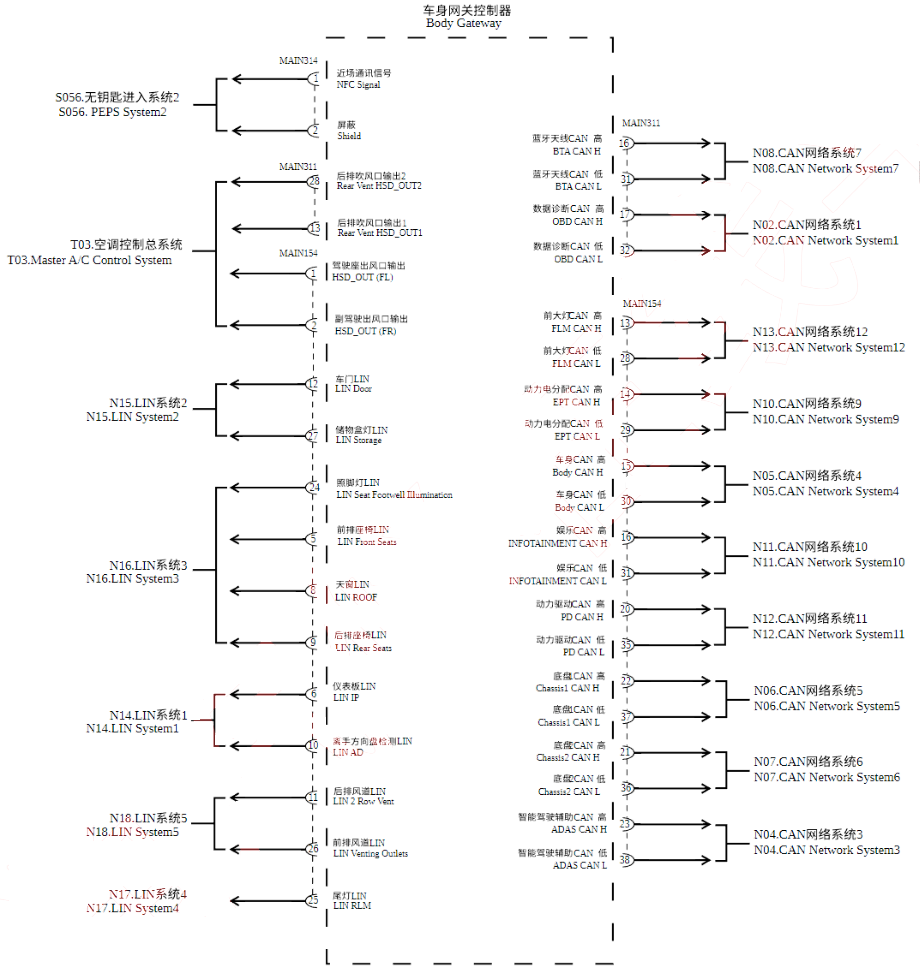
▲图7 蔚来ES8的车身网关控制器接口图
03.
比亚迪
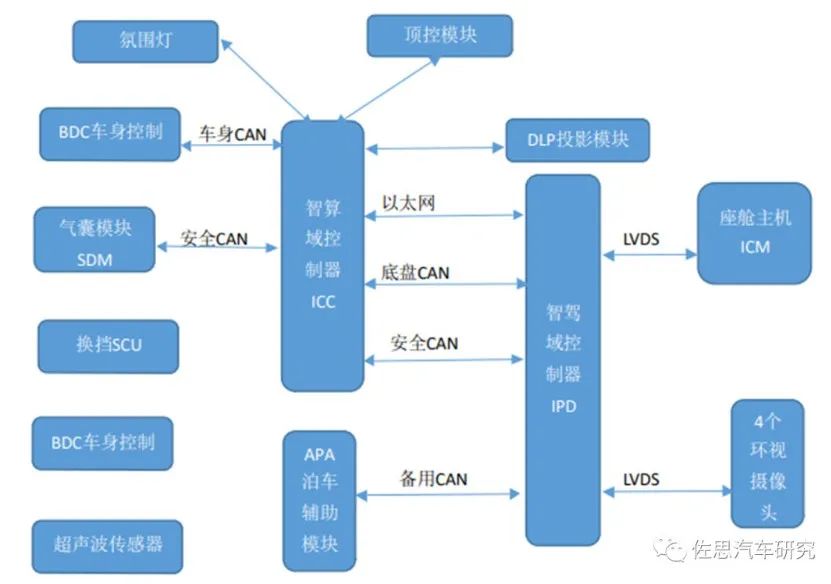
比亚迪E3.0是其最新的域控制器架构,在之前的技术展示中,其包括智能动力域、智能车控域、智能座舱域和智能驾驶域四大域控,如下图所示。
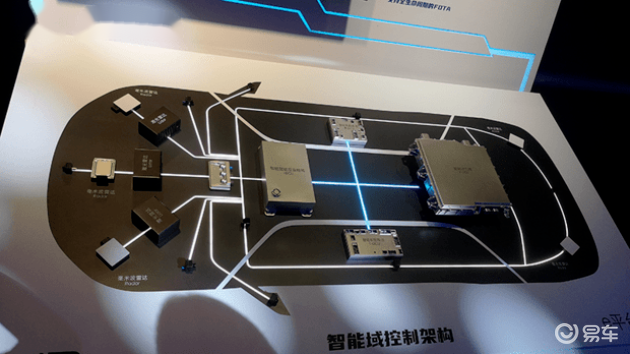
▲图8 比亚迪的智能域控架构
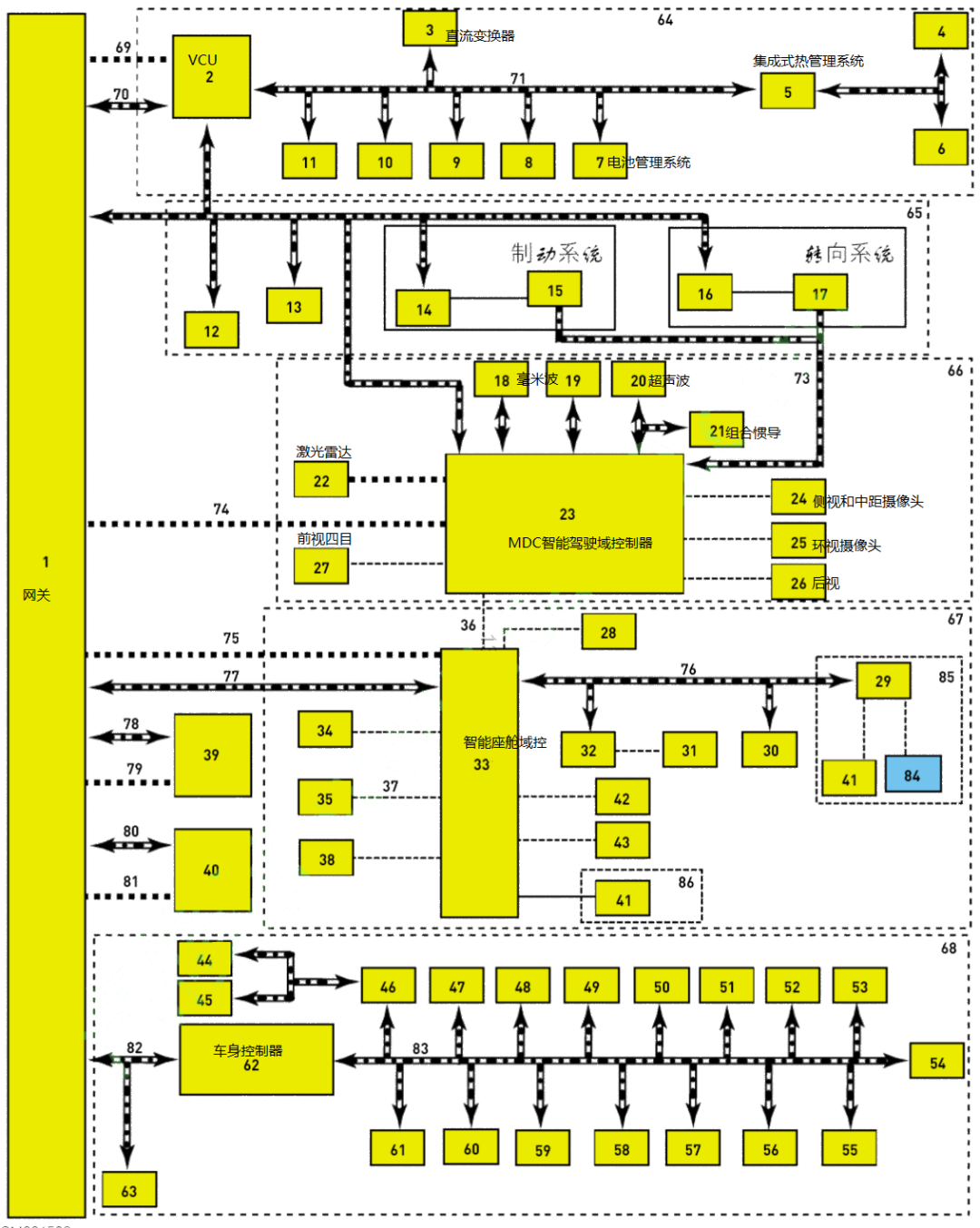
从2023款腾势DM9来看,当前的电子架构还是左、右、中车身控制器串起来的网络,如下图所示,离图8中规划的还有一段距离。
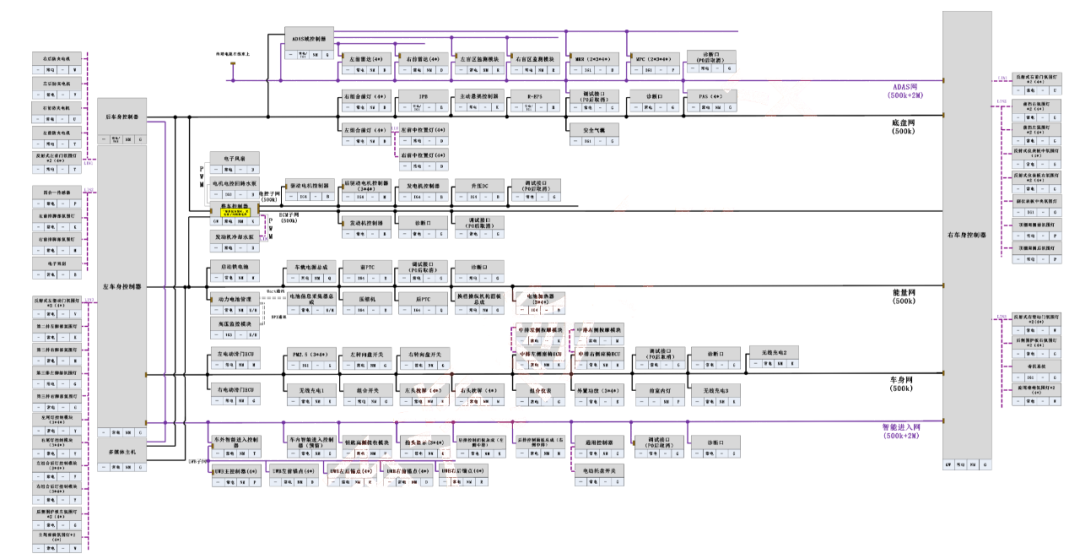
▲图9 腾势D9 电子架构图
04.
上汽智己
2021年零束启动全栈3.0架构的研发,进行进一步的集中化,其两个高性能计算单元,来实现智能驾驶、智能座舱、智能计算、智能驾驶备份功能,再加 4个区域控制器, 实现各自不同区域的相关功能。
而两年后,进展咋样了呢?从智己LS6的电子架构可以看出一二。
LS6共有智联、智算、智驾、座舱四个域控制器。下图为智算域控,从接口来看,其功能类似于算力中心,智联域控类似于传统的T-box,智驾和座舱好理解,就是智能驾驶和智能座舱控制器。
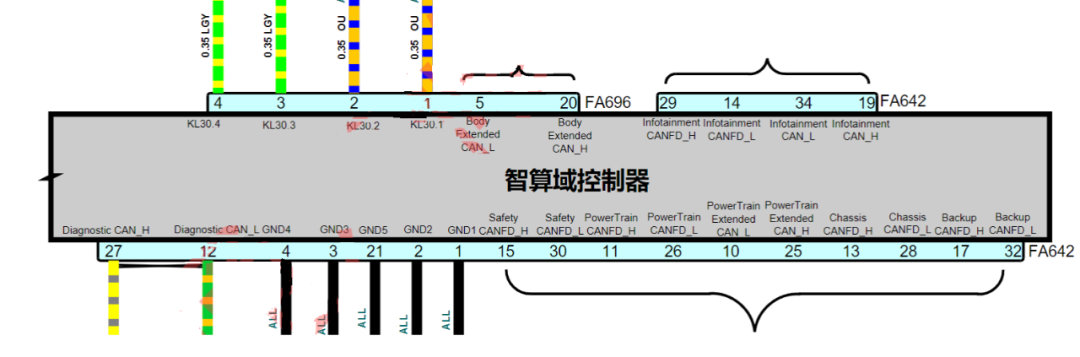
▲图10 LS6 智算域控制器接口图
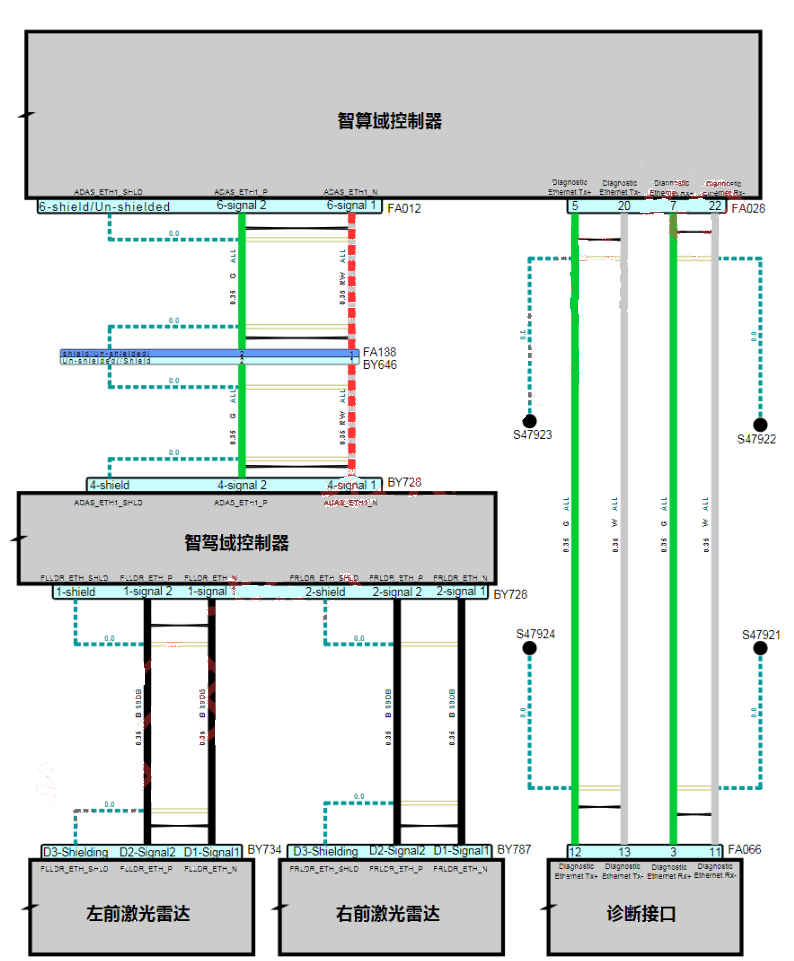
▲图11 LS6 智算与智驾域控制器连接部分图
▲图12 LS6 智算和智驾连接简图(来源:佐思汽研)
智驾和智算颇有点中央集中计算的意图,不过受限于芯片算力,还需要迭代更新。
05.
阿维塔
电子架构是由华为提供,早在2021年上海车展,华为展出了分布式以太网络网关+域控制器(智能座舱CDC、整车控制VDC、智能驾驶MDC)的计算通信架构,如下图所示。

▲图13 华为2021提出的域控架构
那实际落地是怎样呢?下图是阿维塔11的电子架构简图,从图中可以看到座舱域控CDC、智能驾驶MDC以及整车控制器VCU,与图1中基本是一致的,
▲图14 阿维塔11的电子架构
其中网关与PTCANFD、PTSCANFD、CHDAND、TCANFD、RCANFD、ICANFD、BCAN相连,另外还具备100base_T1、100base_Tx、1000base_T1,其中网关与MDC、T-Box、CDC为千兆网,网关与车身域控、VCU、OBD口为百兆网。
智能座舱域
阿维塔的座舱无疑采用的是鸿蒙系统,芯片采用的是麒麟990A系列,基于7nm制程打造,CPU采用了4+4的8核心设计,主频最高为2.86GHz,AI算力为3.5TOPS。并搭载8GB运行内存和128GB储存内存。下图是座舱域控及其附件的示意框图。
▲图15 座舱及其连接附件图
智能驾驶域
阿维塔11的另一个亮点就是其遥遥领先的智能辅助驾驶了,首先从硬件上来看,可谓配置豪华,MDC810+3颗激光雷达+6颗毫米波+13个摄像头+12个超声波探头,总体的框图如下图所示。

▲图16 智能驾驶硬件配置
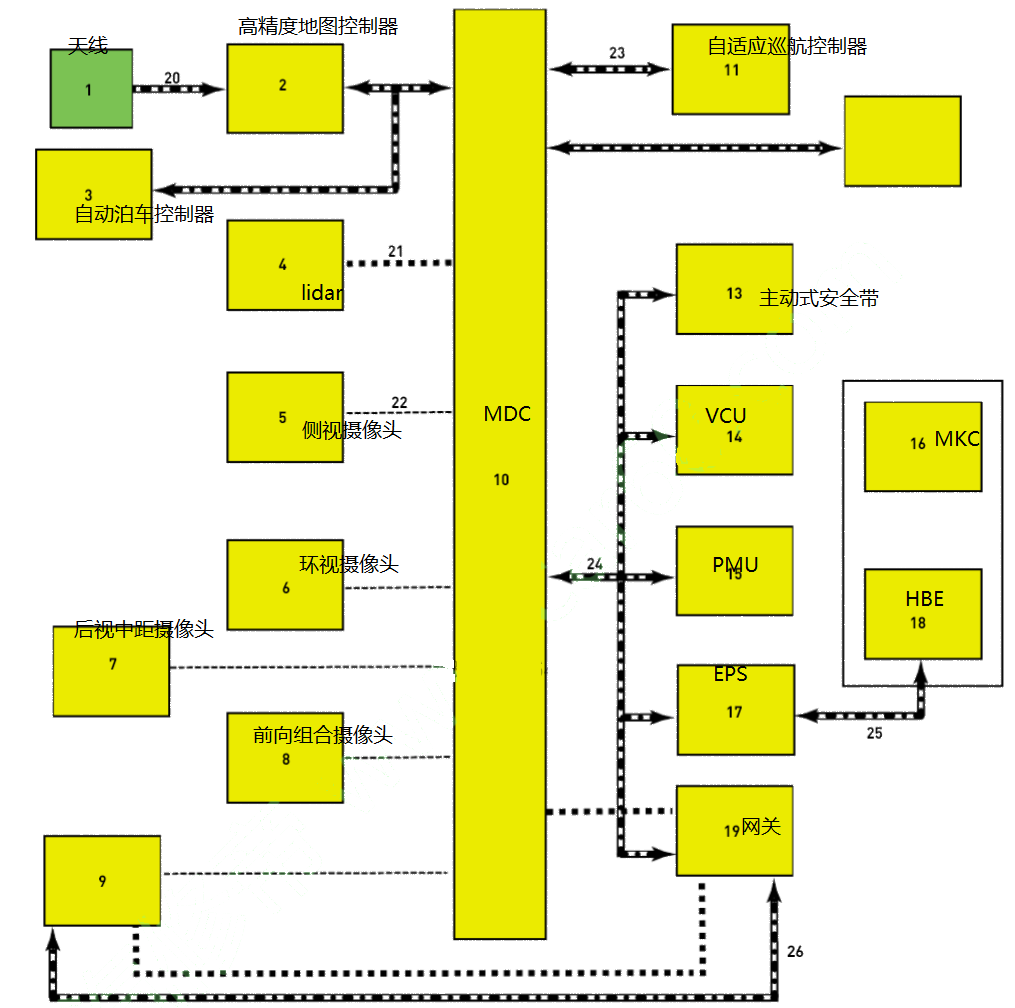
▲图17 智能驾驶硬件拓扑图
这里的核心就是MDC平台,关于阿维塔,官方没有给出具体是MDC610还是MDC810,不过对我们梳理影响不大,因为从华为智能驾驶平台介绍来看, MDC平台统一一套软件架构,支持应用的快速开发和系列化共享,全系列统一尺寸,支持平滑升级替换。也就是说应该就是主控芯片不一样,外围的硬件和接口大差不差。
下面以MDC 610为例,其主控芯片组合采用一颗Ascend 610 + 一颗英飞凌TC397,其硬件架构如图2所示。
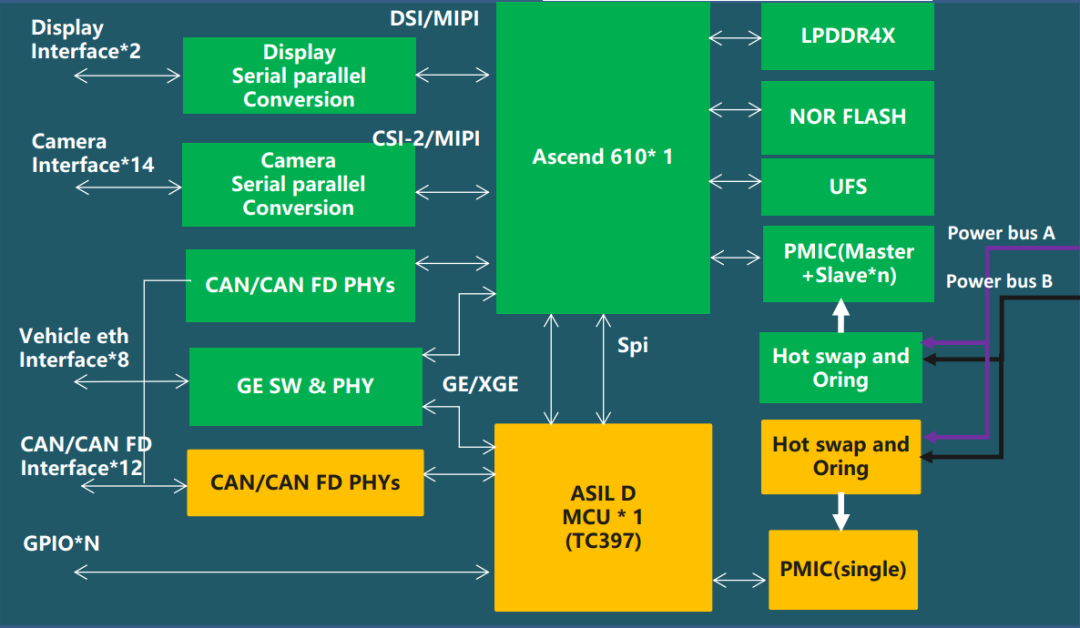
▲图18 MDC 610硬件架构
其各项指标如下所示:
1. AI算力为200 Tops(int8),ARM CORE的整型算力为220K DMIPs;
2. 液冷版功耗约为120W;
3. 传感器接口方面,14个LVDS摄像头接口,8路以太网接口,12路CAN/CANFD接口,6路车载以太网接口,1路PPS接口,各个接口定义如下图所示;
4. 防水等级为 IP67;
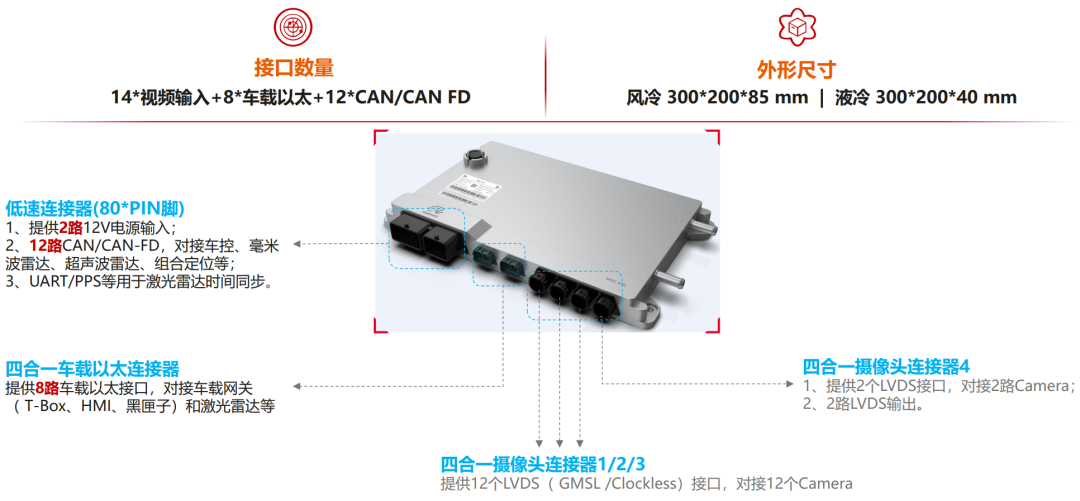
▲图19 对外接口含义
在加速能力方面,首先是支持丰富的AI算子,包括支持业界主流的AI框架,如Caffe、Tensorflow、Pytorch、ONNX,支持400个以上的主流算子的算子库;第二具备可配置硬件加速器,如图4所示;第三具有Vector Core,提供矢量加速和CPU的scalar运算单元紧耦合,加速控制和数据并行运算混合的程序段,有利于频繁递归的CV算法。
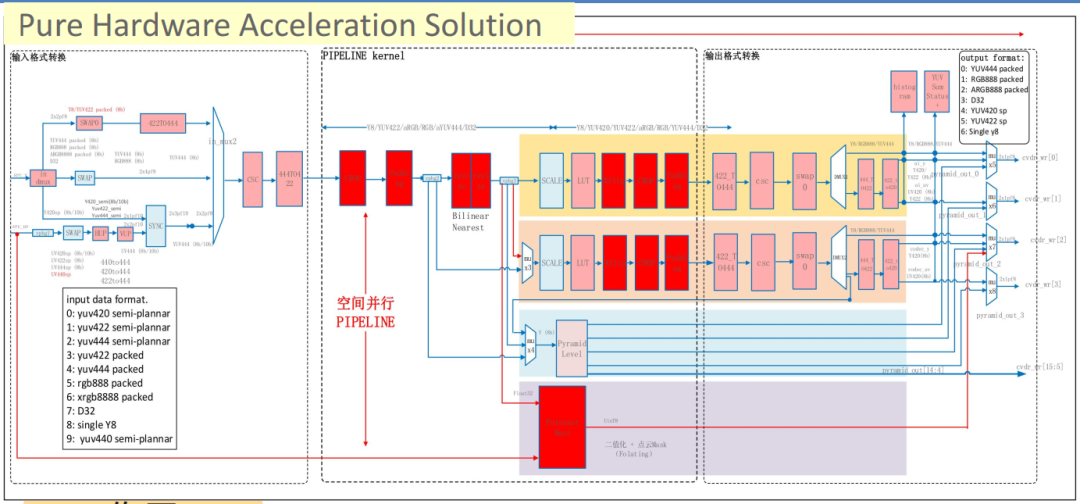
▲图20 硬件加速解决方案
MDC 平台软件架构如下图所示,其核心为华为自主研发的AP+CP+OS。

▲图21 MDC软件架构
华为自主研发Adaptive Autosar符合符合R19-11规范(及以上),具备通信管理、执行管理、状态管理、升级管理、健康管理、持久化、时间同步、访问管理、加密能力、诊断服务、网络管理,如下图所示,并且有符合Adaptive AUTOSAR 规范的配置工具。
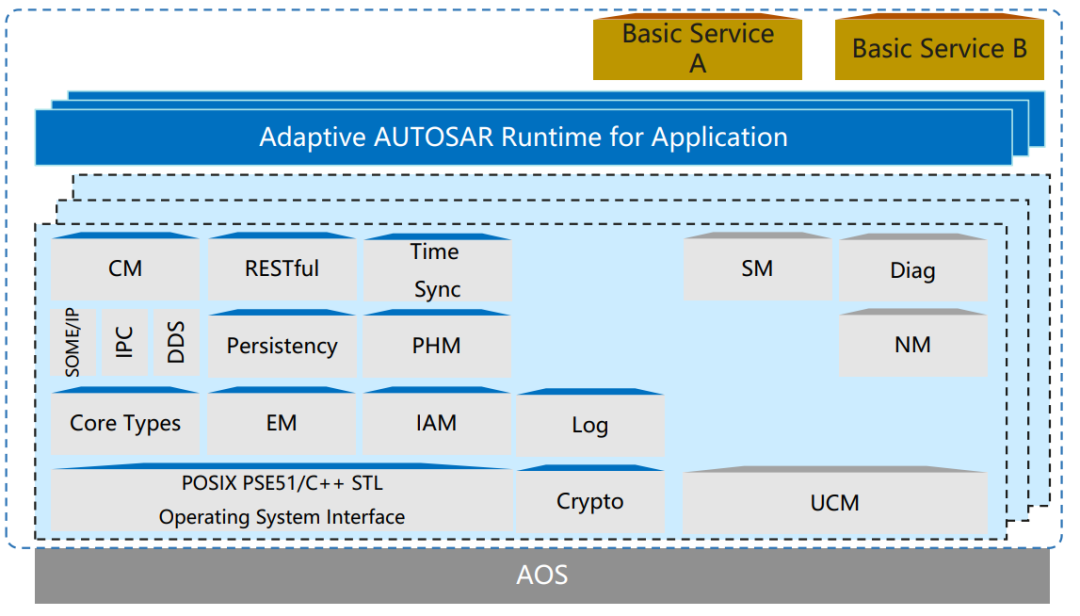
▲图22 MDC Adaptive Autosar特性
AOS为华为自研的实时操作系统,兼容Linux接口,具有确定性调度,低延迟,功能安全和Security特性,并且兼容Linux驱动框架和三方库。
在开放方面,无缝兼容AUTOSAR,在安全方面,支持安全隔离,Safety-Critical与Non-Critical应用安全隔离,软硬件Co-Design,去中心化架构,屏蔽单点软硬件故障,在确定性延迟方面是开源Linux的十分之一,内核延时小于10us,支持CC EAL4++。
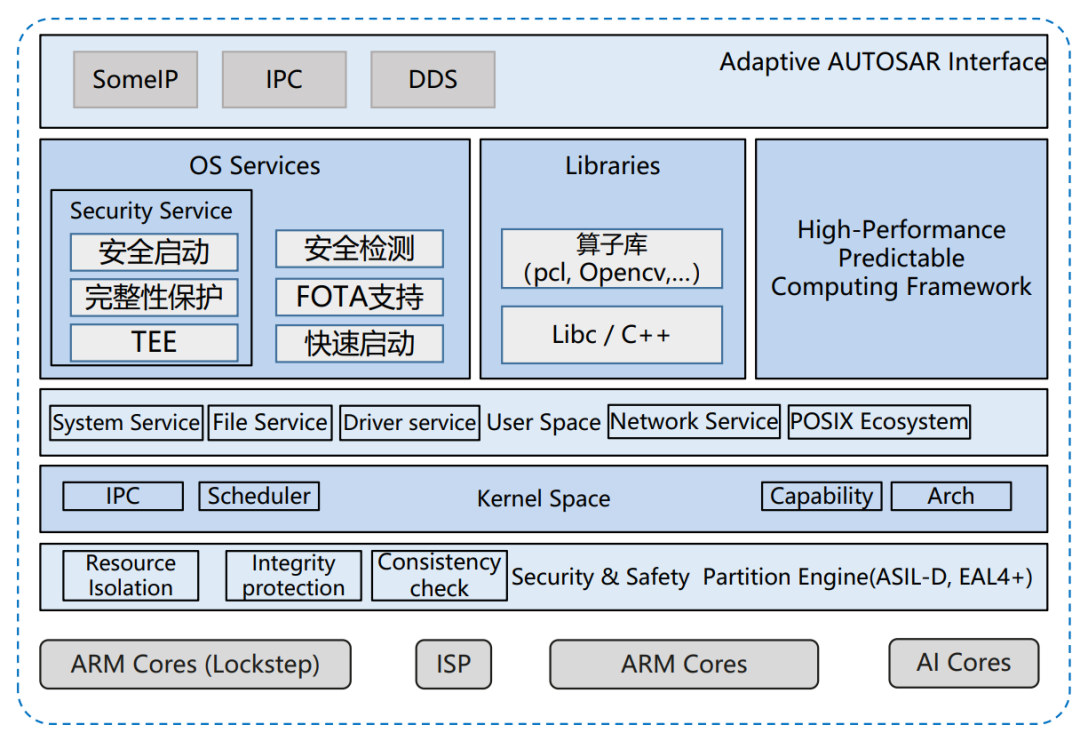
▲图23 AOS软件框架
最后在CP方面,有基于Classic AUTOSAR标准的VOS,满足AUTOSAR CP4.4规范,提供完整的CAN/ETH协议栈、诊断、NM、标定、存储等功能和服务,提供高功能安全的运行环境,支持客户开发/部署ASIL-D级别的业务 。并且如主流的AUTOSAR工具一样,图形化建模&开发工具,支持客户进行SWC的开发、BSW的配置等。
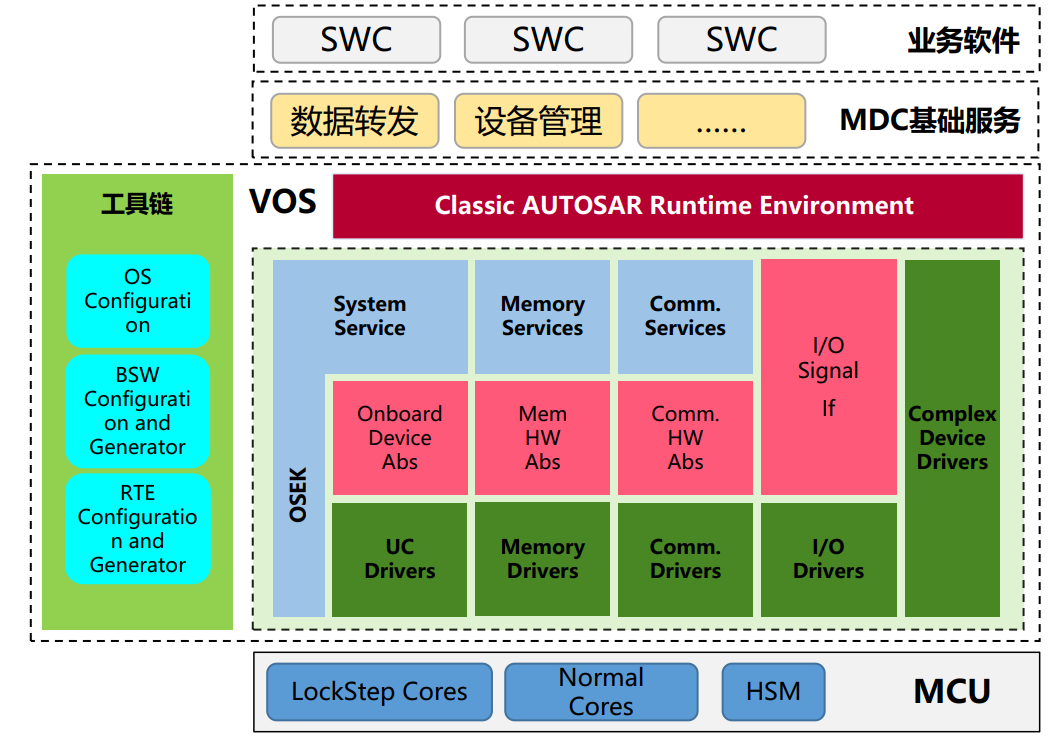
▲图24 VOS软件框架
06.
广汽埃安
2021年11月8日,广汽「星灵电子电气架构」正式发布,该架构实现了车端和云端之间的一体化集中计算,如下图所示。并且当时宣称在2023年落地量产。
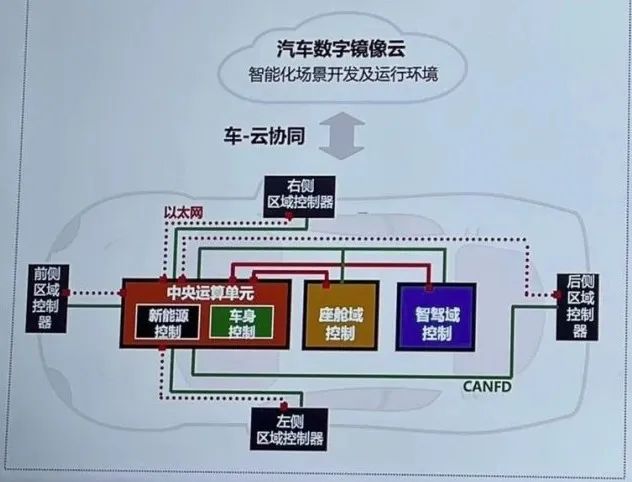
▲图25 星灵电子电气架构
如今2023年已经过去了,听说星灵电子电气架构在昊铂品牌车型上落地了,一起来看看落地的星灵架构。
首先从供电电路来看,与其他主机厂不同的是,确实如星灵架构宣传的电源备份,包括蓄电池和重要控制器供电备份,如下图所示,中央计算单元、四个区域控制器、电助力转向等都采用了双电源电路供电。
从这一点可以看出,其应该是开始做了整车级的功能安全分析,另外双电源的设计应该是主要考虑自动驾驶L3设计,当某个电源时,另一个电源能正常供电,保证自动驾驶系统能控制车子在本车道安全停下来,并且实现一系列的刹车灯点亮,安全停车后车尾应急灯能闪烁报警等操作。
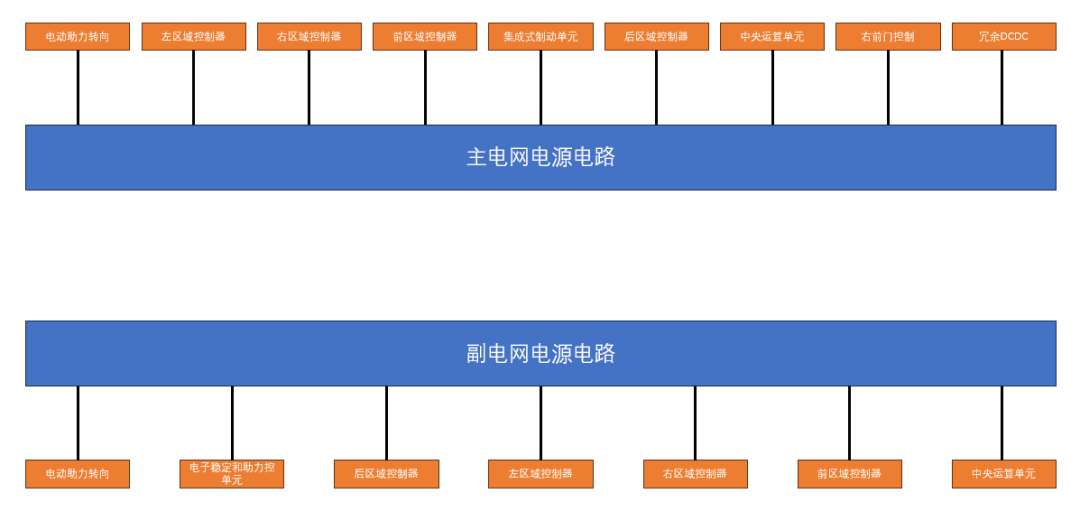
▲图26 主副电源网络
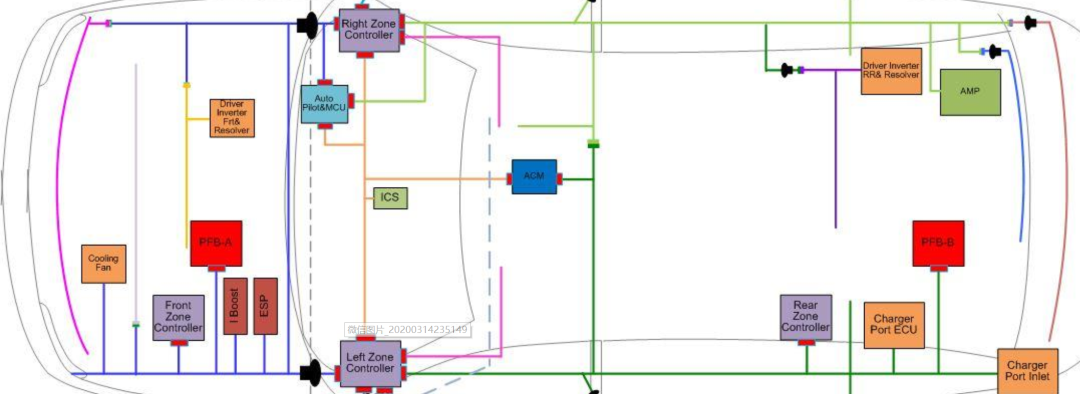
▲图27 整车双电源供电概念图
四个区域控制器负责的功能,按照就近原则来分配的,如下4张图所示。
首先是负责就近控制器的供电以及传感器数据采集、以及简单执行器的控制值,四个区域控制器对外的话,是各自通过一条CANFD总线对外的,分别为ZF_CANFD、ZL_CANFD、ZR_CANFD、ZT_CANFD,与图1的基本像是,只是当前还没有以太网链路。
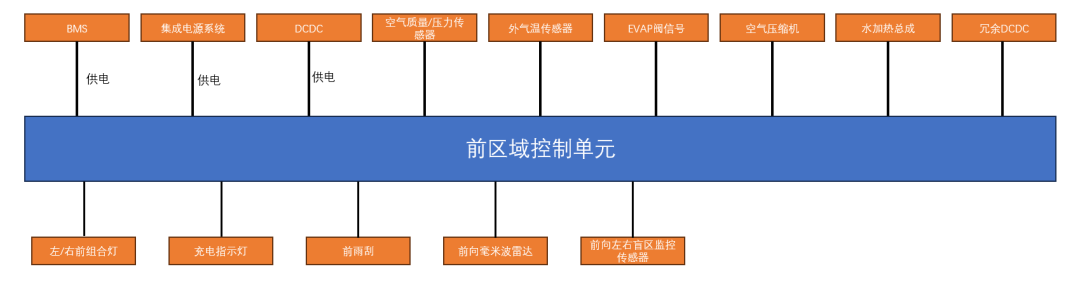
▲图28 前区域控制器
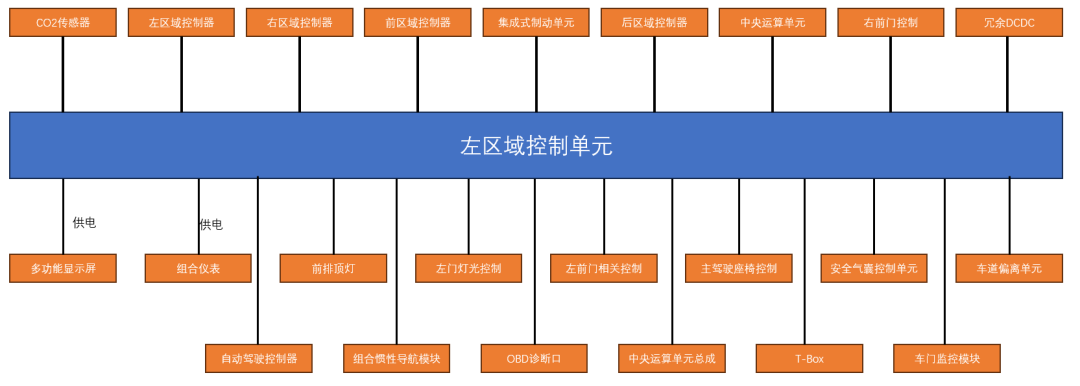
▲图29 左区域控制器
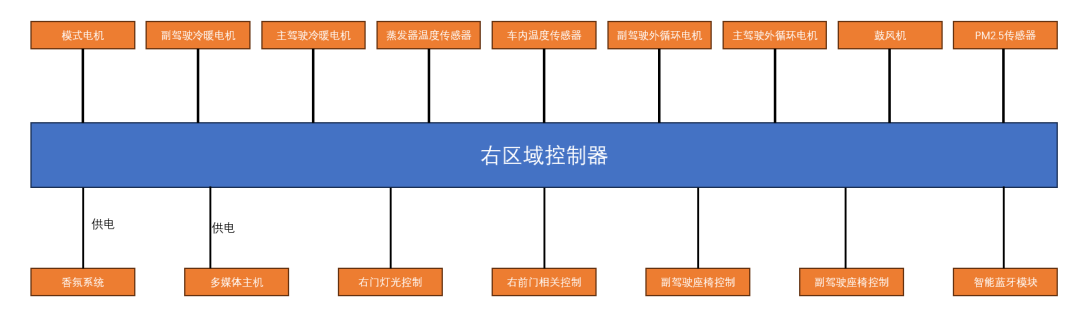
▲图30 右区域控制器
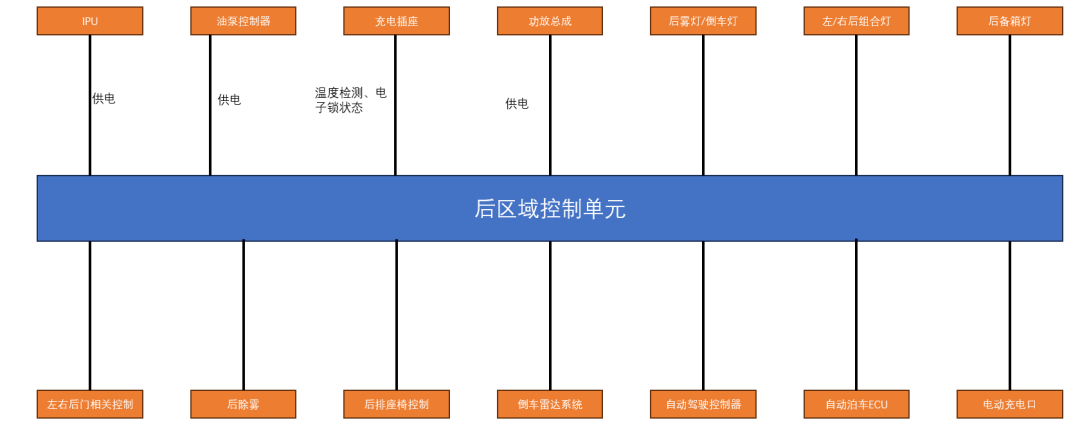
▲图31 后区域控制器
自动驾驶控制单元对外的连接如下图所示。其传感器配置为5R11V12U,对外的话主要是多路ADCX_CANFD,以及以太网总线。主控的话按照之前的介绍为华为的MDC610。
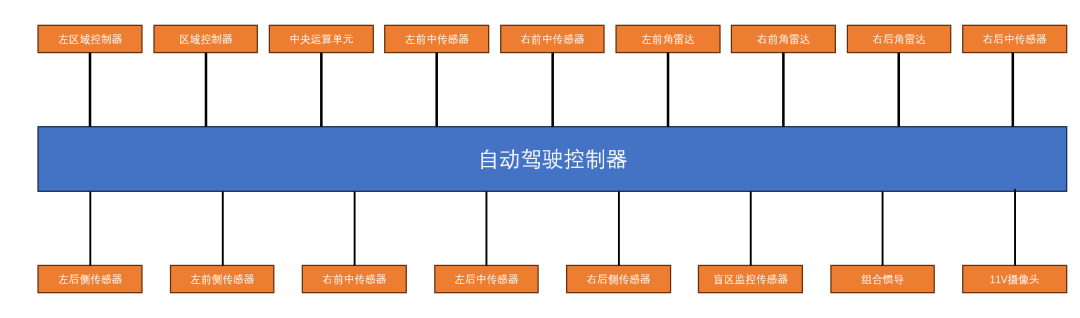
▲图32 自动驾驶控制单元

▲图33 星灵架构三大域控介绍
按照华为MDC解决方案的介绍,MDC610的主控芯片组合采用一颗Ascend 610 + 一颗英飞凌TC397,其硬件架构如下图所示。其他的跟阿维塔上的一模一样。
▲图34 MDC 610硬件架构
07.
总结
从上速梳理来看,之前各个主机厂画的大饼,都在一步一步实现,但是离技术宣传的还有一定距离,需要继续迭代。对于之前各家宣传的区域架构,当前只在埃安上见到了,其他的还没有落地。
-end-
 最前沿的电子设计资讯
最前沿的电子设计资讯

