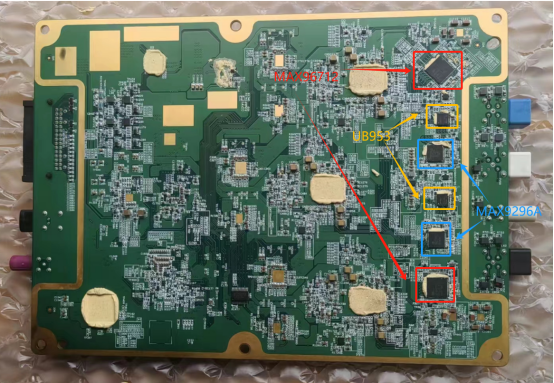
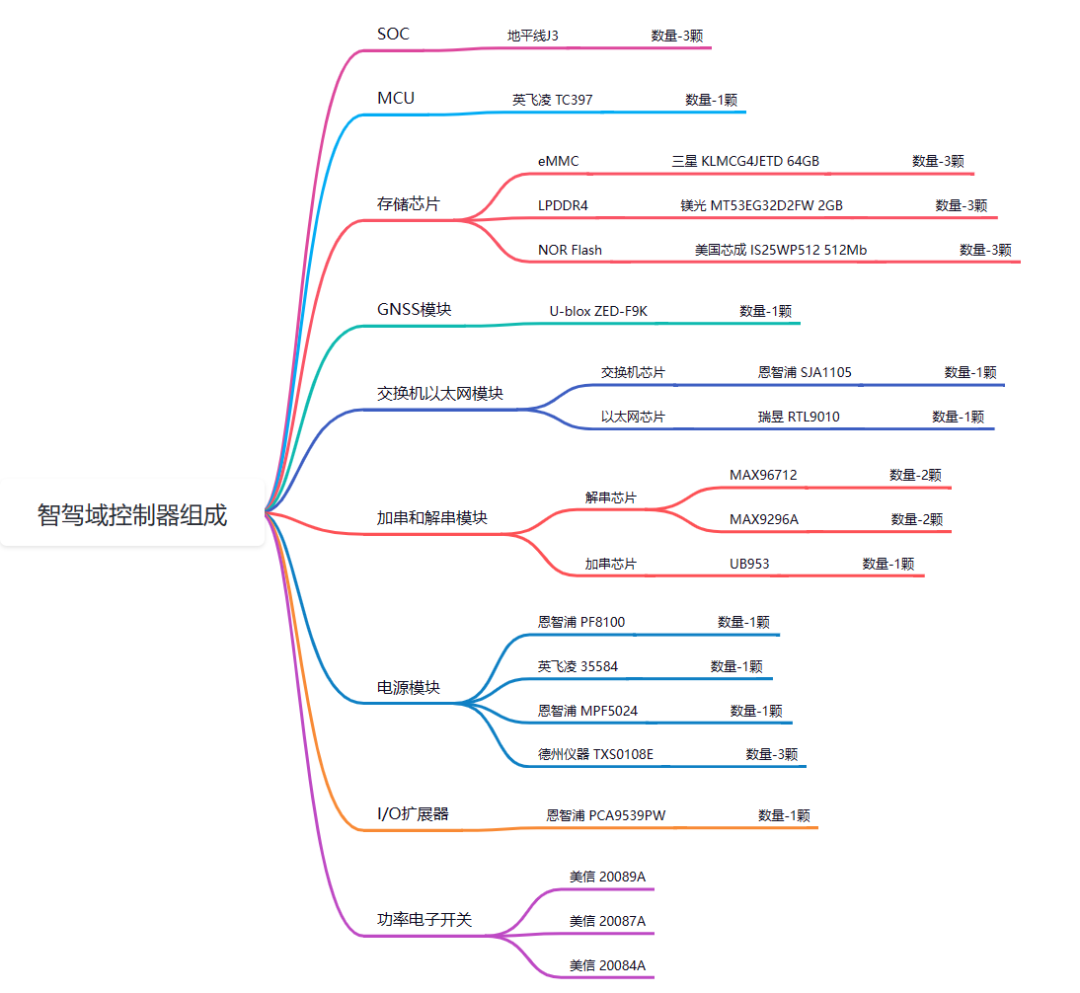
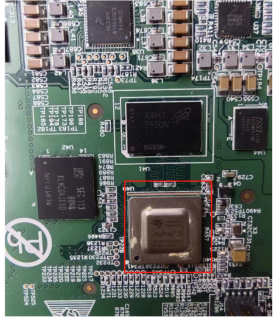
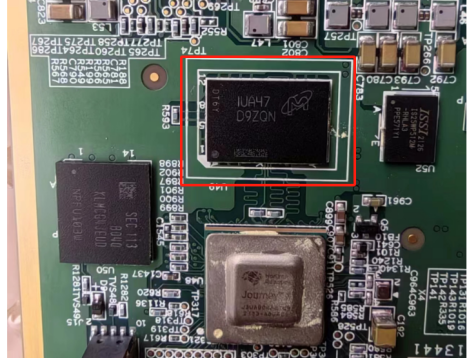
专栏介绍 《汽车控制器拆解》专栏将分享智能汽车控制器的拆解分析,为读者呈现最新的量产控制器的参考设计及选型方案。 上汽荣威第三代RX5是国内首款搭载NGP智能导航辅助驾驶功能的燃油车型。于2022年8月初上市推出NGP智驾功能。今天将和大家一起解密上汽荣威RX5 NGP智驾版域控制器的设计方案。 为了提升用户对高阶智能辅助驾驶的功能体验,上汽荣威在整车的感知传感器方案上也花费了很多心思。全新第三代荣威RX5 NGP智驾版采用多维感知融合方案,配备1个800万像素120°前视摄像头、5个200万像素100°周视摄像头、4个360°环视摄像头、3个毫米波雷达、12个超声波雷达、和高精定位模块等28个传感器,全方位覆盖车辆周围环境,用整车拥有更长的探测距离、更广的探测范围和更精准识别更多物体。 为实现多传感器的融合,实现更复杂的算法,上汽荣威NGP智驾版域控制器由宏景智驾提供,该智驾域控制器使用了3颗地平线征程3高性能国产AI芯片,该芯片使用的是地平线自研的伯努利2.0 BPU®架构,实现环境感知、地图定位、融合规划等多种智能驾驶算法模块,实现360°周视视觉感知全覆盖。此外,该系统支持高效的智能驾驶规划和决策算法,具备深度学习能力,提供迭代更新等功能。 上汽荣威RX5 NGP智驾版域控制器由宏景智驾设计,外壳采用金属机加工而成,表面有较多导热槽,此域控制器采用的自然散热的方式进行散热处理,在主要的芯片表面涂抹导热硅脂与金属外壳内部伸出的金属柱直接接触,从而将热量通过连接有金属柱的外壳散到外界。域控制器外壳外部的导热槽,可以增加与空气的接触面积,更加利于域控制器的散热。 自驾域控制器外壳正面图 自驾域控制器外壳背面图 2、智能驾驶域控制器接口 此域控制器的线速端子分布在域控制器的左右两侧;右侧主要分布电源、IO、通信接口、GPS天线等端子;左侧主要分布了环视、周视、前视的线束端子。 自驾域控制器线速端子图1 自驾域控制器线速端子图2 3、智能驾驶域控制器PCB板 自动驾驶域控制器PCB正面图 自动驾驶域控制器PCB正面图 自动驾驶域控制器PCB正面标注图 图中编号依次为:1-地平线J3,2-镁光DDR4 2G,3-三星 eMMC 64G,4-美国芯成 Nor flash,5-英飞凌 AURIX TC397,6-Ublox ZED F9K,7-NXP交换机 SJA1105Q,8-电源芯片 MC33PF 8100A0ES,9-电源芯片 英飞凌 355584,10-PHY芯片RTL9010AA,12-电源管理芯片 MPF5024AMMA0ES。 图中编号依次为:美信GMSL MAX96712、德州仪器FDLink UB953、美信GMSL MAX9296A。 4、域控制器系统 自驾域控系统框图 自驾域控组成图 5、SOC芯片 SOC,即系统级芯片,是一种集成了处理器核心、内存控制器、外设控制器等多个功能模块的大型集成电路。在自动驾驶域控制器中,SOC芯片负责处理传感器数据、进行实时图像处理和计算机视觉算法。常见的SOC芯片型号有英伟达Drive Orin、英特尔的Mobileye EyeQ系列、高通的Snapdragon Automotive Platform系列、地平线征程系列。 此次上汽荣威RX5采用的是3块地平线J3芯片。 5.1、3块地平线J3的功能 芯片编号 功能 J3-A 负责前视视像头的感知和GNSS模块的定位建图功能。 J3-B 负责周视摄像头感知、后视摄像头和泊车规划功能。 J3-C 负责四路环视摄像头感知和行车规划功能。 5.2、地平线征程3芯片简介 地平线征程3为地平线旗下的第二代车载智能芯片;征程3基于地平线自研的BPU®️2.0 架构,符合AEC-Q100 。征程3不仅支持基于深度学习的图像检测、分类、像素级分割等功能;也支持对 H.264 和 H.265 视频格式的高效编码,是实现多通道复杂计算任务和多通道数字视频录像的理想平台,例如可实现高级别辅助驾驶( ADAS ),自动泊车辅助( APA )等功能。 5.3、 地平线征程3的特征 一般特性 ·采用台积电的16纳米FFC制造工艺; ·采用FCBGA484封装,pin间距为0.65mm,芯片大小为15mmx15mm; ·符合汽车AEC-Q100 2级标准(工作温度为:-40~105摄氏度) CPU特性 ·采用4个Arm Cortex A53内核,具有32KB/32KB L1 I/D核512KB 2级高速缓存; ·最大工作频率为:1.2GHz; ·支持动态频率缩放(DFS); BPU特性 ·由BPU0核BPU1双核伯努利架构组成,算力为5TOPS; ·最大工作频率:950MHz; ·支持动态频率缩放(DFS); DDR特性 ·支持x32片外DDR4/LPDDR4/LPDDR4X DRAM,最大支持4GB容量; ·支持的DDR4最大速度可达DDR4-3200 MT/s; ·支持的LPDDR4/LPDDR4X 最大速度达3200MT/s; 网络接口特性 ·支持一个千兆网接口; ·外部以太网PHY支持RMII和RGMII协议; ·支持实际敏感网络(TSN)和音频视频(AV)流量; 主机接口 ·使用BIF-SPI从接口,AP SPI主设备的传输速率最高可达66 MHz; ·适用于AP eMMC主机的传输模式,最高可达8线使用BIF-SD设备接口的HS200模式(最大192MB/s)。应用处理器(AP)使用BIF-SPI和BIF-SD主机接口访问J3的DDR、SRAM和模块寄存器,以进行数据交换和控制; ·支持USB3.0主机/设备双角色高速接口。 5.4、地平线征程3的使用工具链 6、存储芯片 智能驾驶域控制器中常用的存储模块有eMMC和DDR4等;它们在自动驾驶域控制器中扮演着存储数据的重要角色。EMMC芯片作为闪存储存储设备,负责存储系统的操作系统、算法和数据等。DDR4芯片则是一种高速的内存芯片,负责缓存和运行算法。常见的EMMC芯片型号有三星的KLM和SK Hynix的eMMC,常见的DDR4芯片型号有美光的Crucial和金士顿的HyperX。 6.1、DDR4 镁光DDR4 2GB,具体型号:MT53E1G32D2FW-046 6.2、eMMC 型号:KLMCG4JETD-B041,三星 eMMC 64G 6.3、NOR FLASH 美国芯成 IS25WP512M-RHLA3 512Mb 7、MCU芯片 MCU芯片在自动驾驶域控制器中扮演着重要的角色。MCU,即微控制器单元,是一种集成了处理器核心、内存、输入输出接口等功能的微型计算机。在自动驾驶域控制器中,MCU芯片负责实时计算、数据采集和控制等任务。常用的MCU芯片型号有恩智浦的S32K系列、英飞凌的AURIX TC3X7系列和Renesas的RH850系列。MCU芯片可以通过CAN总线、以太网和SPI等与SOC芯片进行通信。 TC397芯片在此域控制器中的功能:负责整车控制和整车数据交互。 英飞凌AURIX TC397简介 TC397属于英飞凌 AURIX 2G系列产品,该系列MCU具备多达六核的高性能架构,美国内核的时钟频率最高达300MHz,科实现高速的计算能力;在存储方面,该系列产品最大支持16MB Flash,并具有A/B切换功能,可以便捷的实现空中下载软件更新功能--SOTA;在功能安全方面,该系列MCU最多配备了4个锁步核,符合ISO 26262功能安全D级;且还内置了硬件加密模块-HSM,非常使用自动驾驶领域。 TC397特点 特点 内核:6 TriCore™ 运行频率为300 MHz(具有4个锁步核,可提供4000 DMIPS) Flash:16 MB闪存/ECC保护 RAM:高达6.9 MB的SRAM/ECC保护 PHY:1 Gbit以太网 外设:12xCAN FD、2xFlexRay、12xLINs、4xQSP、2xI²C、25xSENT、6xPSI、2xHSSL、4xMSC、1x eMMC/SDIO LVDS:8x400 Mbit/s LVDS雷达接口 SPU:2x SPU(信号处理单元),用于雷达信号处理 定时器:冗余和多样化的定时器模块(GTM、CCU6、GPT12) 加密:EVITA完整HSM(ECC256和SHA2) 封装:BGA-292包装 功能安全:根据ISO 26262/IEC61508开发并记录,以支持高达ASIL-D/SIL3的安全要求 AUTOSAR:AUTOSAR 4.2支持 电源:单电压电源5 V或3.3 V 温度:165°C结温 8、加串/解串芯片芯片 8.1、MAX96712 MAX96712简介 MAX96712解串器将GMSL2或GMSL1串行输入转换为MIPI CSI-2 D-PHY或C-PHY格式的输出。该设备允许每个链路在转发时同时传输双向控制信道数据视频传输正在进行中。MAX96712可以使用行业标准同轴电缆或STP互连来容纳多达四个远程传感器。每个GMSL2串行链路在正向方向上以3Gbps或6Gbps的固定速率工作,在反向方向上以187.5Mbps的固定速率操作。在GMSL1模式下,MAX96712可以与第一代3.12Gbps或1.5Gbps的GMSL1串行器配对,或者在GMSL2模式下与GMSL2串行器操作高达3.12Gbps。 MAX96712支持视频数据的聚合和复制,使来自多个远程传感器的数据流能够组合并路由到一个或多个可用的CSI-2输出。数据也可以路由使得来自单个GMSL输入的多个流能够独立地路由到不同的CSI-2输出。或者,可以使用帧级联将来自多个传感器的数据同步并组合在复合超帧内的单个CSI-2流中。CSI-2接口支持使用C-PHY或D-PHY的2x 4通道和4x 2通道配置。 提供了各种外围通信选项,用于灵活的本地寄存器访问和远程设备编程。三个I2C/UART端口支持并行或隧道式远程外围通信的冗余本地和远程内部寄存器访问。另外还提供了两个SPI端口作为到远程外围设备(GMSL2)的隧道接口。 MAX96712特点 特点 详情 MIPI CSI-2 v1.3输出可配置为2x4通道,1x4车道+2x2车道,或4x2车道 •可选D-PHY v1.2,80Mbps至2.5Gbps/ 通道或C-PHY v1.0,182Mbps至5.7Gbps/通道 •16/32信道虚拟信道支持(D/C-PHY) •传入数据的灵活聚合和路由通过CSI-2 VC或帧级联 •数据可以复制并路由到任何CSI端口 •支持RAW8/10/12/14/16/20,RGB565/666/888,YUV422 8/10位格式 •提高传输效率的双像素模式 •CSI-2车道重新分配和极性翻转 •MIPI/GMSL视频PRBS生成器和检查器 •棋盘格/颜色渐变图案生成器 •原始CSI-2 PRBS生成器 •独立配置所有视频路径和GMSL/CSI-2端口 四路GMSL输入,具有可独立配置的GMSL1/2操作、链路速度和视频格式 •混合支持GMSL1/GMSL2和3G/6G •向后兼容GMSL1串行器 •GMSL1前向链路速度高达3.12Gbps •3Gbps或6Gbps的GMSL2链路速度(正向)和187.5Mbps(反向) •同步和同时支持非同步摄像机 •实现大型相机系统多个串行izer的精确同步 •用于链路测试的GMSL PRBS生成器/检查器 •用于连续诊断的睁眼监视器 •自适应均衡,最多可实现15米同轴具有多个联机连接器的电缆 •兼容50Ω同轴电缆或100ΩSTP ASIL-B兼容(GMSL2) •视频水印插入和检测 •控制信道数据的16位CRC保护检测到错误后重新传输 •视频线路数据的可选32位CRC保护 •视频数据存储器的ECC保护 •CSI-2数据流的CRC保护 用于设备配置和与远程外围设备通信的并发控制信道 •3个I2C/UART、2个SPI、17个GPIO •八个硬件可选设备地址 可编程扩频降低EMI 64引线9mm x 9mm TQFN,带外露焊盘 MAX96712四路独立输入和输出的系统图 8.2、MAX9296A MAX9296A解串器将单个或双串行输入转换为MIPI CSI-2输出。该设备在GMSL1或GMSL2模式下运行。MAX9296A还发送和接收侧信道数据,实现前向路径视频和双向控制数据的全双工传输,成本为50Ω 同轴电缆或100Ω STP电缆应符合GMSL2或GMSL1信道规范。 MAX9296A实物图 MAX9296A两个独立运行的视频源框图 8.3、UB953 UB953简介 DS90UB953-Q1 串行器属于 TI FPD-Link III 器件系 列,旨在支持高速原始数据传感器,包括 2.3MP/60fps 成像器以及 4MP/30fps 摄像头、卫星雷达、激光雷达 和飞行时间 (ToF) 传感器。该芯片提供 4.16Gbps 正 向通道和超低延迟的 50Mbps 双向控制通道,并支持 单根同轴 (PoC) 或 STP 电缆进行供电。DS90UB953- Q1 具有先进的数据保护和诊断功能,可支持 ADAS 和 自动驾驶。在结合配套解串器的情况下,DS90UB953- Q1 可提供精确的多摄像头传感器时钟和传感器同步。 UB953特点 特点 •符合面向汽车应用的 AEC-Q100 标准: – 器件温度 2 级:环境工作温度范围为 -40°C 至 +105°C; • 符合 ISO 10605 和 IEC 61000-4-2 ESD 标准; • 同轴电缆供电 (PoC) 兼容收发器; • 4.16Gbps 等级串行器支持高速传感器,包括全高清 1080p 2.3MP 60fps 和 4MP 30fps 成像器; • 符合 D-PHY v1.2 和 CSI-2 v1.3 标准的系统接口 – 多达 4 条数据通道,每通道速率为 832Mbps – 支持多达四个虚拟通道 • 精密多摄像头时钟和同步 • 灵活的可编程输出时钟发生器 • 高级数据保护和诊断,包括 CRC 数据保护、传 感器数据完整性检查、I2C 写保护、电压和温度测 量、可编程警报以及线路故障检测 • 支持单端同轴或屏蔽双绞线 (STP) 电缆 • 超低延迟双向 I2C 和 GPIO 控制通道支持从 ECU 侧进行 ISP 控制 • 1.8V 单电源 • 低功耗(0.28W 典型值)