

芝能科技出品
芝能会围绕智能驾驶打造一个专门智驾的栏目,结合测试环境来给各位系统性的介绍智能驾驶技术。
通过集成先进的传感器、控制器和执行器,车辆可以实现部分或完全自动驾驶。智能驾驶的功能和场景体系是理解和开发这项技术的关键,但是部分读者其实不了解智能驾驶的功能体系和场景体系,本栏目将持续介绍这些功能,并且介绍它们之间的关联。
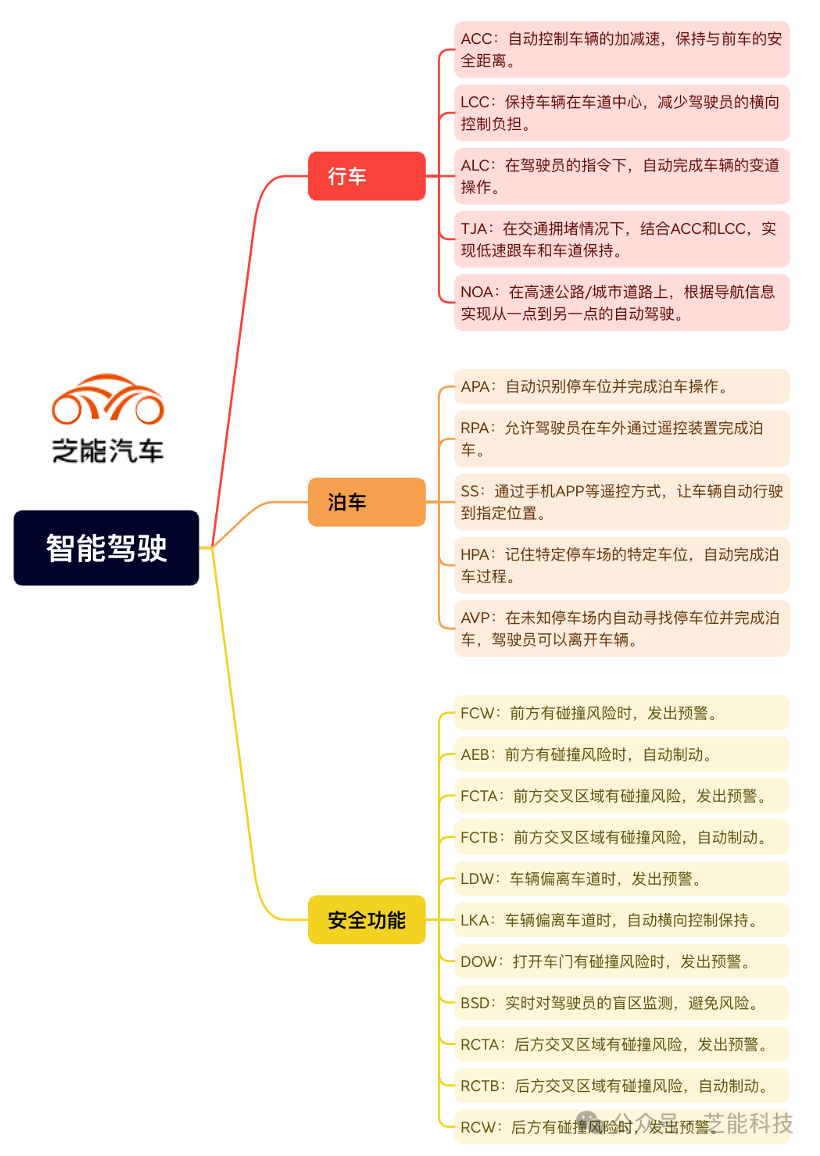
智能驾驶的功能体系通常分为行车功能和泊车功能两大类。

● 行车功能:包括自适应巡航控制(ACC)、车道居中控制(LCC)、自动变道辅助(ALC)、交通拥堵辅助(TJA)和高速领航驾驶辅助(NOA)。这些功能根据SAE的智能驾驶分级标准,从L1到L3不等,涵盖了从简单的纵向控制到复杂的点对点自动驾驶。
◎ ACC:自动控制车辆的加减速,保持与前车的安全距离。
◎ LCC:保持车辆在车道中心,减少驾驶员的横向控制负担。
◎ ALC:在驾驶员的指令下,自动完成车辆的变道操作。
◎ TJA:在交通拥堵情况下,结合ACC和LCC,实现低速跟车和车道保持。
◎ NOA:在高速公路/城市道路上,根据导航信息实现从一点到另一点的自动驾驶。
● 泊车功能:包括自动泊车辅助(APA)、遥控泊车(RPA)、智能召唤(SS)、记忆泊车(HPA)和自主代客泊车(AVP)。这些功能从L2到L4级别,提供了从辅助泊车到完全自动泊车的解决方案。
◎ APA:自动识别停车位并完成泊车操作。
◎ RPA:允许驾驶员在车外通过遥控装置完成泊车。
◎ SS:通过手机APP等遥控方式,让车辆自动行驶到指定位置。
◎ HPA:记住特定停车场的特定车位,自动完成泊车过程。
◎ AVP:在未知停车场内自动寻找停车位并完成泊车,驾驶员可以离开车辆。
除了智能行车和泊车两大类功能外,智能驾驶还涵盖了一系列主动安全功能。
这些功能包括前向碰撞预警(FCW)、自动紧急制动(AEB)、前方交叉区域预警(FCTA)、前方交叉区域辅助(FCTB)、车道偏离预警(LDW)、车道保持辅助(LKA)、开车门预警(DOW)、盲点监测(BSD)、后方交叉区域预警(RCTA)、后方交叉区域辅助(RCTB)、后向碰撞预警(RCW)。

● 这些功能与自车相对位置的危险源相关:
◎ FCW:前方有碰撞风险时,发出预警。
◎ AEB:前方有碰撞风险时,自动制动。
◎ FCTA:前方交叉区域有碰撞风险,发出预警。
◎ FCTB:前方交叉区域有碰撞风险,自动制动。
◎ LDW:车辆偏离车道时,发出预警。
◎ LKA:车辆偏离车道时,自动横向控制保持。
◎ DOW:打开车门有碰撞风险时,发出预警。
◎ BSD:实时对驾驶员的盲区监测,避免风险。
◎ RCTA:后方交叉区域有碰撞风险,发出预警。
◎ RCTB:后方交叉区域有碰撞风险,自动制动。
◎ RCW:后方有碰撞风险时,发出预警。
这些功能提供了各种安全效果,帮助驾驶员及时警示并采取行动,减少事故风险。 智能驾驶的场景体系基于用户的出行体验,主要包括高速、城区和停车场三大区域。 ● 行车场景 :包括本车道内行驶、变道、十字路口和匝道等子场景。在这些场景中,智能驾驶系统需要考虑舒适性、安全性、响应度和识别能力等因素,以提供流畅和安全的驾驶体验。 ◎ 针对本车道行驶,用户对舒适性和车辆保持在车道内的效果十分关注。舒适性体现在车速的加减速度,而车道保持效果则通过车辆与车道线的距离来评估。 ◎ 对于弯道行驶,系统的过弯能力直接影响用户的信赖度,而跟车时的安全感和舒适性也同样重要。在十字路口场景下,系统的识别能力和对红绿灯的理解影响着驾驶员的安全感。而匝道则考验系统的进出策略和车速变化控制能力。 ● 泊车场景 :涉及停车场内的自动行驶、搜索车位、泊入和泊出车位等过程。在这些场景中,系统的泊车能力和舒适性是关键的用户体验因素。在停车场内行驶阶段,系统需要准确识别各种静态和动态障碍物,保证安全行驶。搜索车位时,系统的车位识别能力直接决定了用户的停车效率和体验。 通过深入理解功能与场景的关联,开发者可以更好地规划智能驾驶的性能指标,确保用户体验与功能开发同步进行。这不仅有助于提升产品的市场竞争力,还能确保智能驾驶技术更加安全、可靠和用户友好。 智能驾驶的功能和场景之间存在密切的关联。例如,ACC和LCC主要适用于本车道内行驶场景,而ALC适用于变道场景。TJA和NOA则涉及更复杂的情景,包括本车道行驶、变道和匝道等。泊车功能如APA和RPA主要应用于停车场内的泊车场景。
 最前沿的电子设计资讯
最前沿的电子设计资讯

