在汽车技术飞速发展的今天,后轮转向技术正成为提升车辆性能和安全性的关键。本文将带您深入了解后轮转向的概念、工作原理以及它在现代汽车技术中的重要性。
后轮转向技术的应用和发展历程反映了汽车工业在追求更优操控性能和安全性方面的不懈努力。这一技术的发展经历了多个阶段,从最初的概念验证到现代的广泛应用。后轮转向技术是现代汽车技术中的一个重要创新,它通过改变后轮的转向角度,以增强车辆的操控性、稳定性和灵活性。这项技术的引入,标志着汽车动力学和操控性能的一次重大进步。
#01
在现代,后轮转向技术已经相当成熟,被广泛应用于各种类型的车辆中,包括豪华轿车、SUV和超级跑车。这项技术不仅提高了车辆的操控性和灵活性,还显著增强了高速行驶时的稳定性和安全性。随着自动驾驶技术的发展,后轮转向在提高车辆的路径跟踪能力和整体稳定性方面发挥着越来越重要的作用。
#02
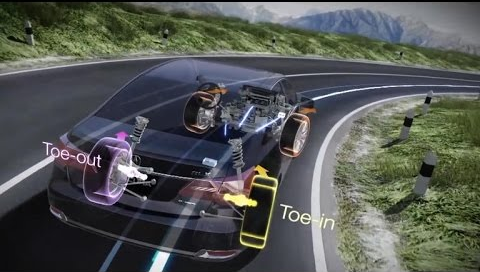
在传统的汽车设计中,只有前轮负责转向,而后轮则是固定的。后轮转向技术的核心在于,它使后轮也能够根据特定的驾驶条件进行转向。这种转向可以是与前轮同向(提高高速稳定性)或反向(增加低速灵活性),甚至可以是独立于前轮的转向(提高操控性)。
后轮转向示意图
后轮转向技术主要可以分为两大类:被动转向和主动转向。这两类后轮转向技术各有特点,适用于不同的车辆类型和驾驶场景。
被动后轮转向(Passive Rear Steering)是一种不需要电子控制单元(ECU)或电机等电子设备介入的后轮转向技术。与主动后轮转向(Active Rear Steering)相比,被动后轮转向不提供实时调整后轮角度的能力,而是依赖于车辆设计中的几何关系和动态特性来实现后轮的转向效果。这种系统结构相对简单,成本较低,不需要复杂的电子控制单元。但它提供的转向效果有限,且无法根据不同的驾驶条件进行调整。
被动后轮转向的工作原理通常与车辆的悬挂系统、车轮定位和车轮几何有关。
以下是一些实现被动后轮转向的方法:
悬挂几何设计:通过设计特定的悬挂几何,如采用可变后轮前束或后轮束角,来实现后轮的被动转向。
车轮定位:通过调整车辆的转向几何,如转向轴线和车轮中心的相对位置,来改变车辆的转向特性。
车轮运动学:利用车轮在行驶中的运动学特性,如侧倾或俯仰,来影响车辆的转向行为。
车辆动态响应:通过车辆在行驶中的动态响应,如侧滑或过度转向,来改变后轮的轨迹。
被动后轮转向的主要优点是系统简单,不需要复杂的电子设备和控制系统,因此在一些传统的车辆设计中得到应用。然而,这种转向方式通常不如主动后轮转向灵活,也无法根据不同的驾驶条件进行实时调整。被动后轮转向在某些高性能车辆中也有应用,如赛车的设计中,通过悬挂系统的特殊设计来实现后轮的转向效果,以提高车辆的操控性和稳定性。此外,一些高性能的改装车辆也会采用被动后轮转向的策略,以优化车辆的驾驶性能。

Saab ReAxs 是一种独特的被动后轮转向系统。这个系统在车辆行驶过程中自动调整后轮的角度,以提高车辆的操控性和稳定性。ReAxs 系统特别设计用于改善车辆的转向反应和整体操控性能,特别是在高速行驶和紧急避让情况下。通过这种设计,Saab 车型能够在保持舒适性的同时,提供更加精准和稳定的驾驶体验。通过采用四连杆后悬挂布局,工程师们能够通过精心调整内外悬挂衬套,调校出独特的被动后轮转向特性(Saab ReAxs)。这种设计提高了车辆的操控性和稳定性,特别是在高速行驶和紧急避让情况下。通过这种方式,Saab 9-3不仅提高了安全性,还提升了整体的驾驶体验。
2.2、主动转向(Active Rear Steering):
主动后轮转向(Active Rear Steering)是一种高级的汽车转向技术,它允许车辆的后轮在行驶过程中根据特定的条件进行转向。这种转向可以是与前轮同向或反向,甚至可以独立于前轮的转向。主动后轮转向的主要目的是提高车辆的操控性、稳定性和灵活性,从而提升驾驶体验和行车安全。
带有后轮转向功能的车辆可以调整前轮和后轮以转向车辆。这可以实现更大的响应性和提高稳定性。
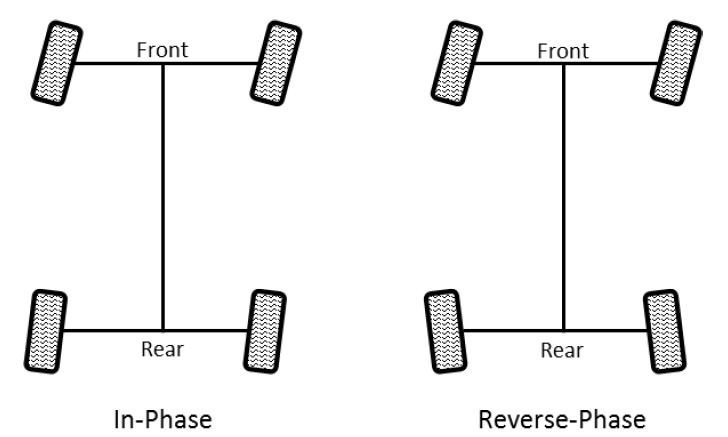
车辆的后轮方向可以由位于每个车轮的独立电机或后轴上的单个电机控制。后轮可以与前轮同向旋转(“同相位”)以在高速行驶时提供更稳定的操控。在低速时,后轮也可以与前轮反向旋转(“反相位”)以改善转弯。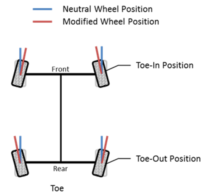
最后,在紧急刹车时,后轮可能会“内八字”以提高稳定性。根据后轮执行器的实现方式,可用的后轮配置可能受到限制(例如,集中式后轮转向可能无法提供“内八字”位置)。
1、传感器:这些传感器负责收集车辆的实时数据,如车速、转向角度、车辆动态等。这些数据是后轮转向系统决策的基础。这些传感器可以是轮速传感器、转向角度传感器、横向加速度传感器等。
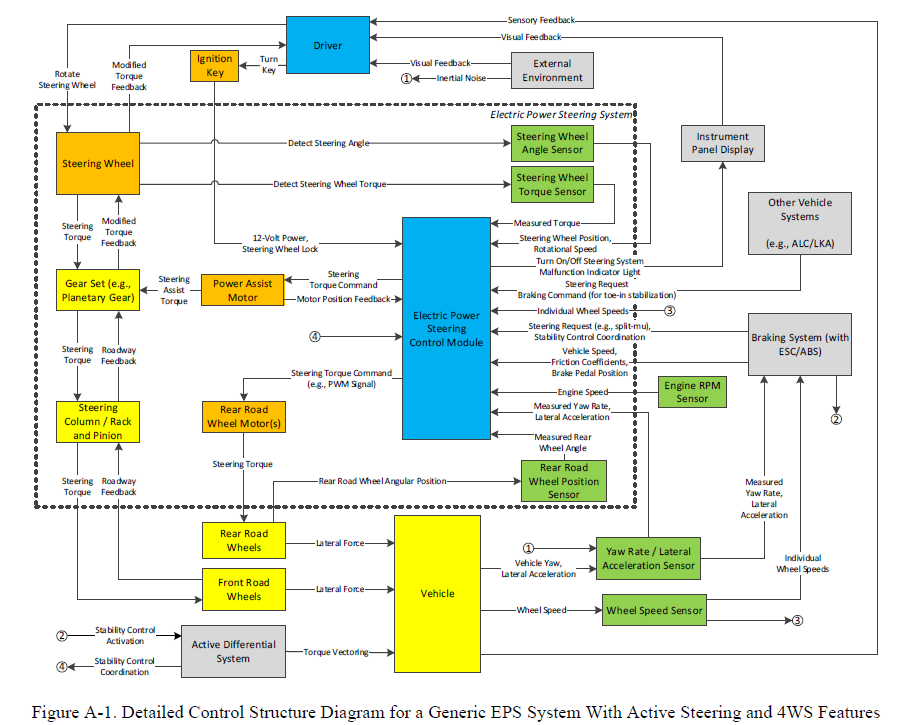
从含后轮转向的系统框架简图中可以看出,后轮转向行程位置传感器的质量好坏决定了性能表现,对后轮位置传感器的功能安全目标诸如:
(1)后轮位置传感器旨在在所有车辆运行条件下测量/检测后轮的位置。测量的后轮位置需要经过验证以确认其有效性和正确性。
如:如使用注入故障法:
向EPS控制模块传输非零的后轮测量值。
对从后轮位置传感器到EPS控制模块的连接进行电磁干扰(EMI)和静电放电(ESD)干扰的测试。
存储后轮位置传感器的错误校准数据。
模拟后轮位置传感器电源的丢失。
模拟后轮位置传感器连接中的短路。
模拟后轮位置传感器与EPS控制模块之间的连接短路。
这些故障案例涉及的后轮位置传感器是电子助力转向(EPS)系统的重要组成部分,用于提供后轮的位置信息。如果这些传感器出现故障或存储了错误的数据,可能会导致EPS系统无法准确地控制车辆的转向,从而影响车辆的操控性和安全性。因此,这些故障案例需要通过严格的测试和验证来确保传感器的可靠性和准确性。
(2)后轮位置传感器应具备诊断功能,以检测由电磁兼容性/电磁干扰(EMC/EMI)、静电放电(ESD)、污染、单事件效应以及其他环境条件引起的与安全相关的故障。如:EPS(电动助力转向)后轮位置传感器电路包括
以下几种故障类型:
范围/性能故障:后轮位置传感器无法正确检测后轮的位置,可能导致转向系统无法准确控制后轮。
低电平故障:传感器电路无法提供正确的信号电压,可能影响转向系统的正常工作。
高电平故障:传感器电路可能产生错误的信号电压,影响转向系统的准确性和可靠性。
间歇性故障:传感器电路可能间歇性地失效,导致转向系统无法持续稳定工作。
这些故障类型可能会导致转向系统无法准确控制后轮,从而影响车辆的操控性能和安全性。因此,对于EPS后轮位置传感器电路,需要进行严格的测试和验证,以确保其可靠性和准确性。同时,车辆制造商和维护人员应定期检查和维护传感器电路,以防止这些故障的发生。
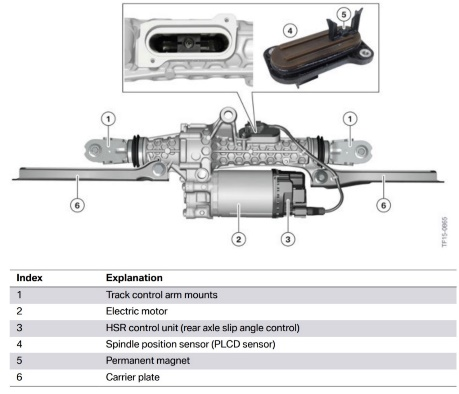
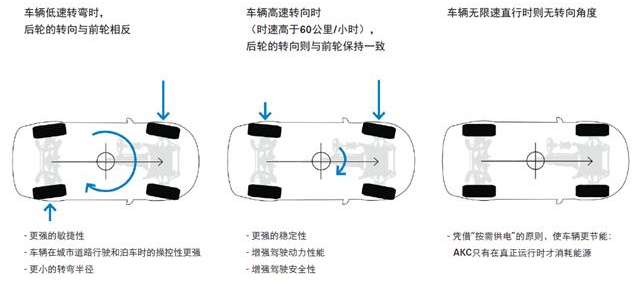
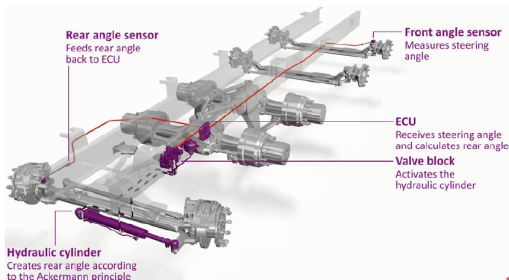
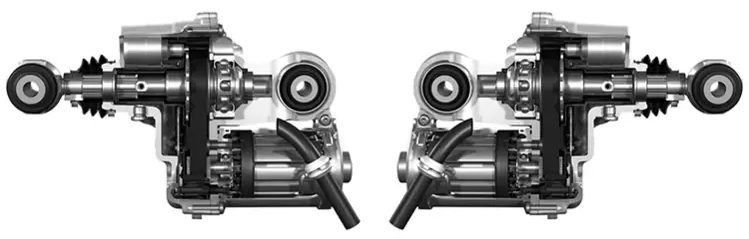
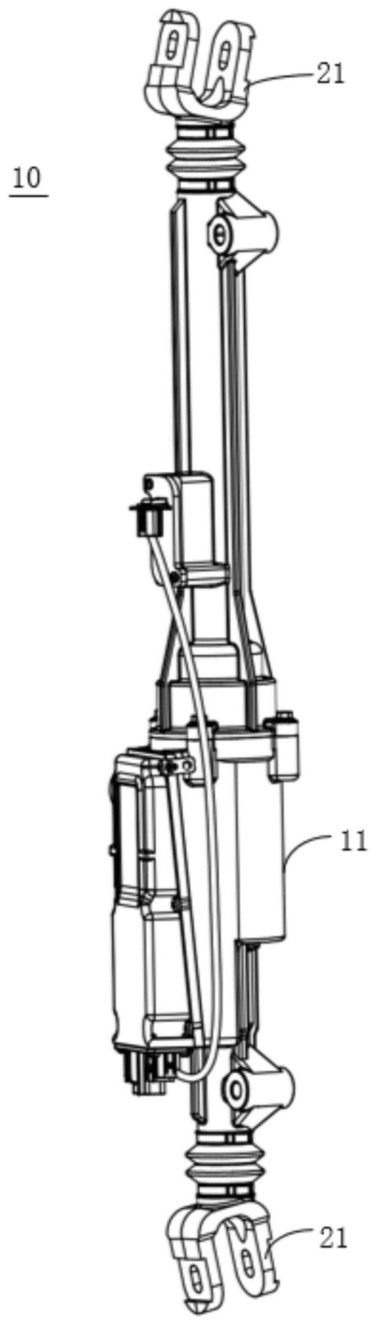
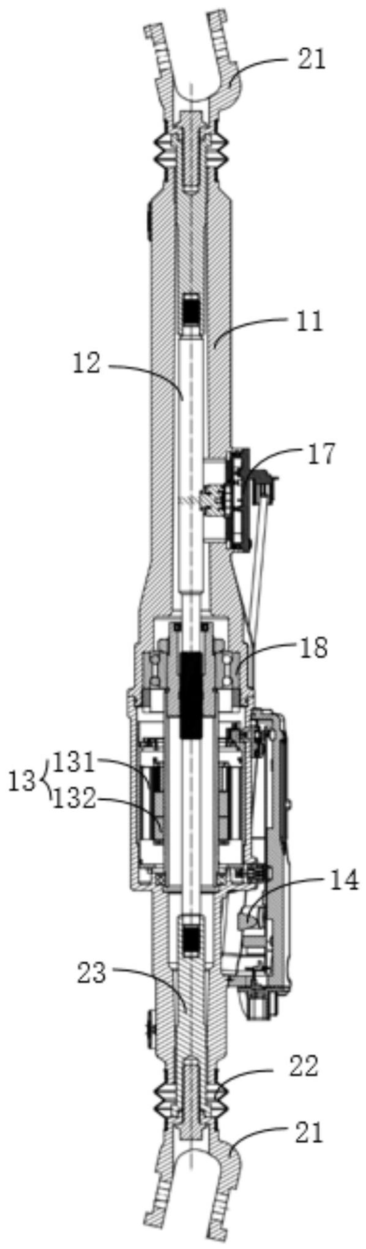
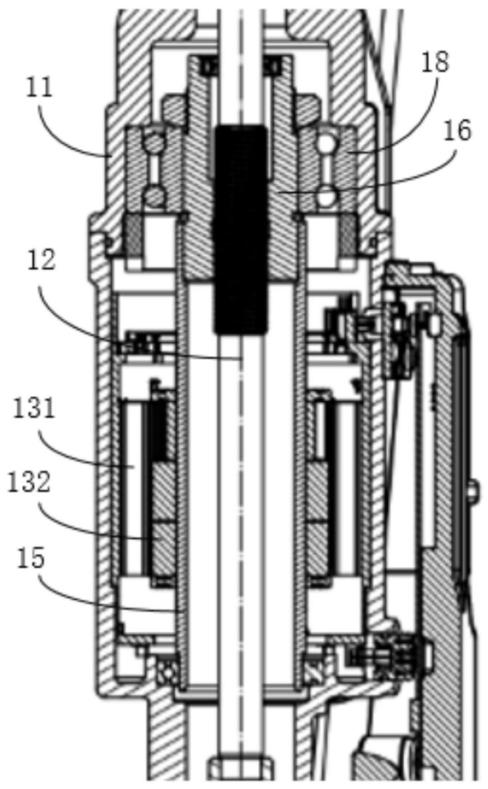
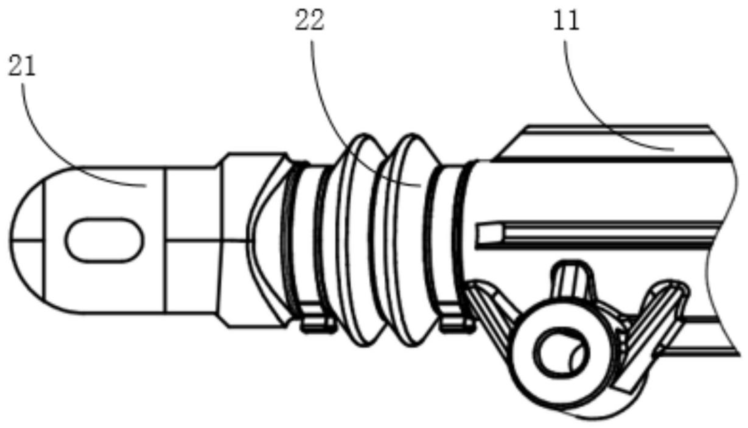
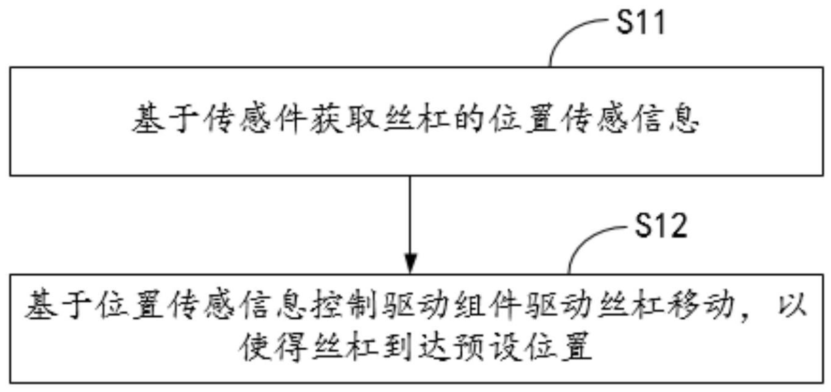
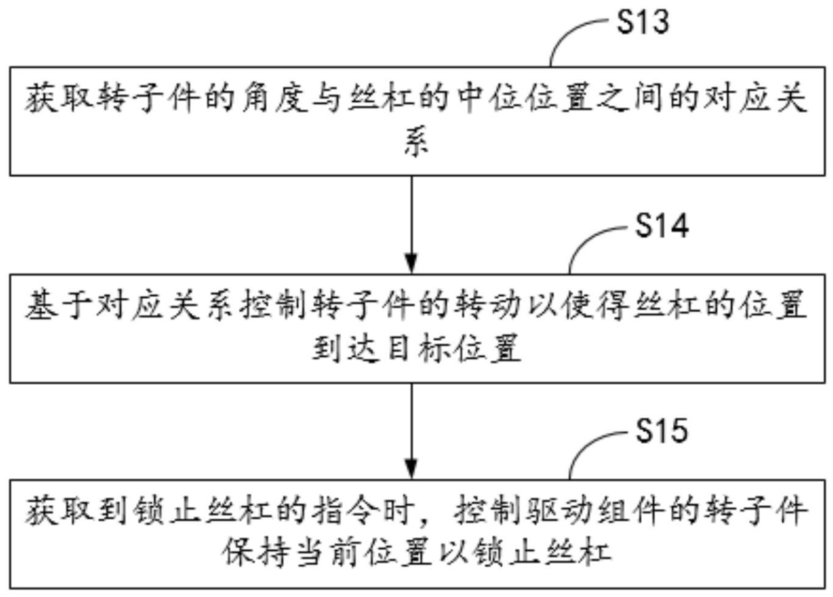
EPS Rear-Wheel Position SensorCircuit | Rear-Wheel Position Sensor EPS Rear-Wheel Position SensorCircuitRange/Performance Rear-Wheel Position Sensor EPS Rear-Wheel Position SensorCircuit Low Rear-Wheel Position Sensor EPS Rear-Wheel Position SensorCircuit High Rear-Wheel Position Sensor EPS Rear-Wheel Position Sensor Circuit Intermittent Rear-Wheel Position Sensor (3)单点后轮位置传感器硬件故障都应在故障检测间隔内被检测到,并在故障探测与响应间隔(FTTI)内得到缓解。 用于电动后轮转向的行程位置传感器 该传感器引起的风险如: 危害 潜在的意外车辆横向运动/意外偏航 危害场景 EPS控制模块命令后轮同相位转向的情况包括: • 当驾驶员或其他车辆系统未发出转向命令时 潜在的风险因素 组件 潜在失效形式 后轮位置传感器(Rear-Wheel Position Sensor) 内部硬件故障可能会影响后轮位置传感器,并导致其向EPS控制模块输出错误的后轮转向角度测量值。 后轮位置传感器(Rear-Wheel Position Sensor)向EPS控制模块(EPS Control Module)传输数据 车辆内部的电磁干扰(EMI)或静电放电(ESD)可能会影响后轮位置传感器到电动助力转向控制模块的信号。 表中的第一个故障模式描述了后轮位置传感器(例如,内部短路)的硬件故障。如果后轮位置传感器向EPS控制模块提供错误的数据,EPS控制模块可能会认为它在使后轮居中,而实际上它正在将它们移出中心位置。 表中的第二个故障模式描述了其他车辆组件的电磁干扰(EMI)或静电放电(ESD)如何影响从后轮位置传感器到EPS控制模块的连接。如果这影响了后轮位置的测量,EPS可能会错误地控制后轮的位置。 2、控制单元(ECU):控制单元是后轮转向系统的“大脑”。它接收传感器的数据,收集到的数据被发送到车辆的中央控制单元(ECU),也就是车辆的“大脑”。ECU根据这些数据以及预先设定的算法,计算出后轮应该转动的角度和方向。 3、执行机构:执行机构负责根据ECU的指令调整后轮的角度。后轮转向执行机构通常是一套电动或液压驱动的转向机构,它根据ECU的指令来调整后轮的角度,在电动转向系统中,通常使用电动机来驱动转向齿轮或转向拉杆,从而改变后轮的方向。 4、转向模式:主动后轮转向系统可以根据不同的驾驶条件,自动或手动切换不同的转向模式,如高速模式、低速模式和中性模式。 后轮转向系统可以根据不同的驾驶条件,自动或手动切换不同的转向模式: 5、动力源:主动后轮转向系统需要电源来驱动其执行机构。这可以是车辆的电池系统,或者是一个专门的后轮转向电源。 6、通信网络:后轮转向系统需要与其他车辆系统(如刹车系统、加速系统和稳定控制系统)进行通信,以确保车辆的整体协调和性能。 7、用户界面:在一些车型中,后轮转向系统可能包括一个用户界面,允许驾驶员根据个人偏好调整后轮转向设置。 主动转向系统使用电子控制单元(ECU)来控制后轮的转向角度。ECU根据车辆的实时数据(如车速、转向角度、车辆动态等)来调整后轮的转向。这种系统可以提供更加灵活和动态的转向响应,能够根据不同的驾驶条件(如高速行驶或低速泊车)自动调整后轮转向策略。它通常提供更好的操控性和驾驶体验,但成本和复杂性相对较高。 主动后轮转向技术在现代汽车中扮演着至关重要的角色。它不仅提升了车辆的操控性和安全性,还为驾驶者提供了更加舒适和愉悦的驾驶体验。随着这项技术的不断发展和普及,未来将有更多的汽车配备主动后轮转向功能,为驾驶者带来更加安全、舒适和愉悦的驾驶体验。 #03 #04 博世电液后轮转向系统的主要特点包括: 1.电子控制:系统通过电子传感器和执行器实时监测和调整后轮的转向角度,以适应不同的驾驶模式。 2.提高操控性:在低速行驶时,后轮与前轮相反方向转向,减少转弯半径,提高车辆的敏捷性。而在高速行驶时,后轮与前轮同方向转向,增加车辆的稳定性。 3.增强稳定性:在高速变道或受到侧风影响时,系统能够自动调整后轮转向,帮助车辆保持直线行驶,提高驾驶安全性。 4.适应性:系统适用于多种类型的车辆,包括乘用车、商用车和特种车辆,以提高其操控性能和驾驶体验。 博世电液后轮转向系统通过其先进的电子控制技术和精密的液压执行机构,为车辆提供了更高的操控性能和驾驶体验,特别是在复杂的驾驶环境中。这种系统在提高车辆的动态性能和驾驶安全性方面发挥着重要作用。 #05 电动后轮转向系统是一种先进的车辆动力学控制系统,它使用电动执行器来调整后轮的转向角度。这种系统可以显著提高车辆的操控性、稳定性和灵活性,特别是在不同的行驶速度和复杂的驾驶条件下。 电动后轮转向 电动后轮转向系统的主要特点包括: 1.电动执行器:系统使用电动执行器来精确控制后轮的转向角度,这些执行器响应速度快,控制精度高。 2.提高操控性:在低速行驶时,后轮与前轮相反方向转向,减少转弯半径,提高车辆的敏捷性。而在高速行驶时,后轮与前轮同方向转向,增加车辆的稳定性。 3.增强稳定性:在高速变道或受到侧风影响时,系统能够自动调整后轮转向,帮助车辆保持直线行驶,提高驾驶安全性。 4.适应性:电动后轮转向系统适用于多种类型的车辆,包括乘用车、商用车和特种车辆,以提高其操控性能和驾驶体验。 应用后轮转向目前已在行业内实施,其主要优势有两个: 1.第一个优势是在低速时的更易操作性和更好的敏捷性。通过让前轮和后轮向相反方向转向,有效地缩短了轴距。这在停车场的操作中非常有帮助,但平行停车需要练习。所有车辆都可以通过这种方式得到改进,但对于长轴距的车辆来说,这种改进尤为明显。 电动后轮转向系统通过其先进的电子控制技术和精密的电动执行机构,为车辆提供了更高的操控性能和驾驶体验,特别是在复杂的驾驶环境中。这种系统在提高车辆的动态性能和驾驶安全性方面发挥着重要作用。 #06 #07 由于讲解后轮转向机械机构的资料较少,以重庆赛力斯新能源汽车设计院有限公司公开的发明专利《车辆、后轮转向组件及控制方法》讲解下后轮转向机械结构,背景技术为:车辆的后轮转向组件与车辆的后轮连接,用于控制车辆的后轮进行转动,进而配合车辆的前轮实现转向。后轮转向组件中的丝杠可能会受到外力作用而引起后轮角度变动,这种被动变动会引起车辆跑偏、高速可能引起车辆失稳。此时,需要对丝杠及逆行锁定。 序号 名称 作用 备注 10 后轮转向组件 提供后轮转向功能 11 壳体 支撑后轮转向组件 12 丝杠 两端分别用于与节叉连接,所述丝杠通过在其长度方向上移动而拉动所述节叉移动,以实现车辆后轮的转向; 丝杠可以在任意的位置保持锁止状态,例如,在丝杠处于中位位置时,丝杠可以保持锁止状态。在丝杠处于非中位位置时,丝杠也可以保持锁止状态,进而使得车辆的后轮处于特定的转向状态。 13 驱动组件 包括转子件以及定子件,所述定子件套设在所述转子件上,所述转子件套设在所述丝杠上,所述转子件能够相对于所述定子件转动,所述转子件转动时驱动所述丝杠沿其长度方向移动; 131 定子件 132 转子件 14 控制装置 与所述驱动组件连接,所述控制装置用于控制所述转子件转动到特定角度,以使得所述丝杠位于目标位置。 控制装置14用于根据位置传感信息控制驱动组件13以控制丝杠12移动。传感件17与控制装置14之间可以通过有线或无线的方式实现连接,进而使得传感件17获取到位置传感信息后可以通过有线或无线的方式实现传输到控制装置14中,进而使得控制装置14根据位置传感信息实现对驱动组件13的控制。 15 芯轴 转子件套设在所述芯轴上且相对于所述芯轴固定,所述芯轴套设在所述丝杠上,所述转子件转动时带动所述芯轴同步转动,所述芯轴转动时驱动所述丝杠沿其长度方向移动。 16 螺纹件 螺纹件的一端与所述芯轴的一端固定连接,所述螺纹件套设在所述丝杠上且与所述丝杠螺纹连接,所述芯轴转动时带动所述螺纹件转动,所述螺纹件转动时驱动所述丝杠沿其长度方向移动。 17 传感件 传感件相对于所述丝杠间隔设置,所述传感件用于获取所述丝杠的位置传感信息。 传感件17可以是电磁式、光电式、差动变压器式、电涡流式、电容式、干簧管、霍尔式等类型的传感器,不作具体限制。 18 轴承 所述轴承套设在所述螺纹件上,所述芯轴转动时带动所述螺纹件在所述轴承内转动。 21 节叉 节叉21可以直接或间接通过连接件与后车轮的连接,进而实现与后车轮的直接连接或间接连接。节叉21可以通过拉动后车轮的方式,实现后车轮的转向,进而实现车辆的转向。 22 伸缩结构 22,节叉21设置在伸缩结构22的一端。丝杠12移动使得节叉21移动时,节叉21会使得伸缩结构22进行伸缩,进而适应节叉21的移动。(个人认为起到防尘、防护的作用) 23 连接结构 连接结构23的一端与丝杠12的一端连接,连接结构23的另一端与节叉21连接,进而实现丝杠12与节叉21之间的间接连接。 #8 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||