
华为最近在智能驾驶领域做了新的变化,推出了华为视觉智驾HUAWEI ADS基础版。华为的视觉智驾方案采用了毫米波雷达和高清摄像头的融合,放弃使用激光雷达,降低了成本。
华为的智界S7 Pro车型展示了这一方案的实际应用,导入了先进的算法,使车辆能够在没有高精度地图的情况下实现高速领航功能。
我们来探讨这一技术路径对中国的智能驾驶路线的影响。

从特斯拉纯视觉方案,特别是FSDV12.3迭代以后,通过E2E得方式深度学习技术实现自动驾驶功能,是一条核心路径。目前已经确定要走纯视觉路线(路线之一)的包括,小鹏、百度和华为,接下来也会有很多的企业进行尝试。
特别是,华为的视觉智驾方案的走向,如果进一步成熟并得到市场认可,可能会对整个智能驾驶行业产生深远影响。目前,市场还需要进一步验证华为的智驾系统是否能够平衡消费者和制造商的需求,并成为广泛接受的市场标准。

华为的方案,更加重视安全性,所以一开始围绕激光雷达,多种传感器的融合使用(ADS2.0搭载了业界首创激光融合GOD网络,这里也是把激光雷达+视觉放在了一起),提高了整体系统的鲁棒性和可靠性。
在特斯拉100亿美元投入算力之前,纯视觉方案主要诟病的地方主要是冗余和安全性。但是端到端模型的推出标志着智能驾驶技术迈向了一个新的里程碑,将智能驾驶系统的发展推向了一个全新的阶段,为汽车的自主性和智能化带来了革命性的变革。大家都开始预期智能驾驶的GPT时刻。
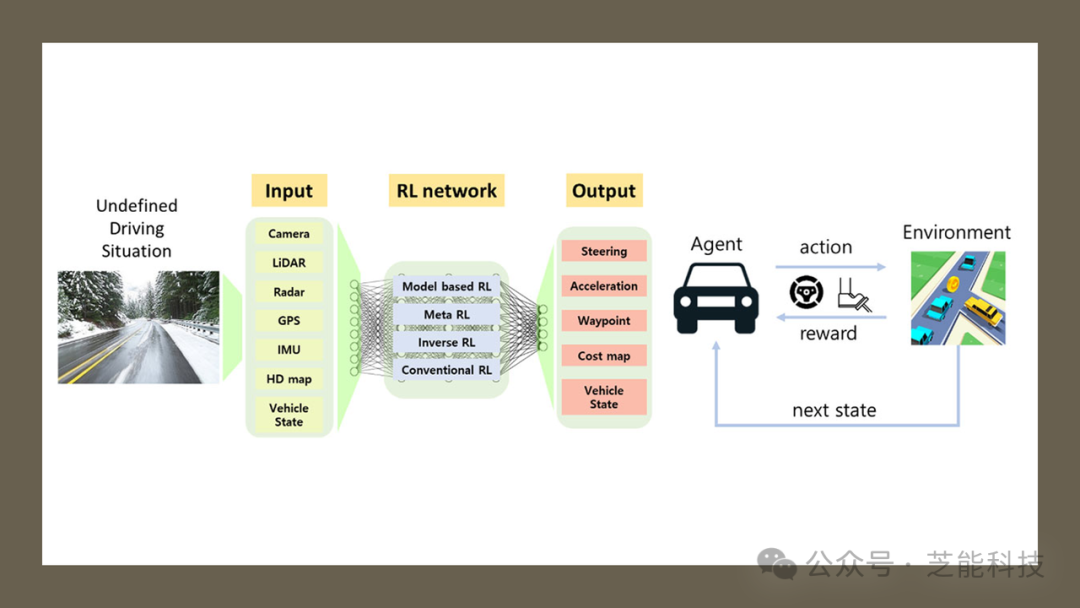
所谓端到端模型,就是指车辆从感知到决策再到控制这一整个过程被统一为一个模型。传统的智能驾驶系统往往采用模块化的方式,将感知、预测和规划等功能分解成独立的模块,然后分别进行开发和训练。这种方式存在着信息传递损失、系统复杂度高、维护难度大等问题。
而端到端模型的出现,将感知、预测和规划等功能整合到一个模型中,无需独立开发和训练各个模块,从而避免了信息传递时的损失,简化了系统的结构,降低了维护成本。更重要的是,端到端模型采用了深度学习技术,使车辆能够像人类驾驶员一样,通过学习和思考来做出最优的驾驶决策。这种模型的推出,不仅提高了汽车的智能化水平,还改变了人们对智能驾驶的认知。以往人们可能会担心智能驾驶系统在复杂路况下的表现,要解决Conner case需要大量的时间,但端到端模型的出现,使得车辆能够更加自如地应对各种复杂的道路情况。
在实际应用中,端到端模型让汽车能够更加准确地感知周围环境,更加智能地预测其他车辆和行人的行为,更加灵活地规划最优的行驶路径。随着小鹏、华为和百度都开始进入这个领域,我们可以期待城市NOA有实质性的进展。
华为的影响力还是很大的,这个基础方案到底有多大的潜力,我们继续评估,但是围绕视觉+算力的迭代模式,基本确定了中国车企的发展方向。之前堆砌激光雷达的做法,基本已经过时了。
 最前沿的电子设计资讯
最前沿的电子设计资讯

