
在中国,智能驾驶卷的核心焦点成了城市NOA(Navigation Oriented Autopilot)功能,不管是华为、小鹏、蔚来和理想,后来的小米,都把城市NOA作为竞相角逐的焦点。
城市NOA能够让车辆在城市道路上自动行驶,并根据导航规划进行路线选择和变道操作,极大地解放了驾驶员的双手。
然而,现阶段的城市NOA仍面临着一些技术挑战,其中包括:
● 感知能力不完善,遇到复杂交通环境,甩手给消费者;
● 视觉+定位精度不够高,有时候容易走错道;
● 面对中国特色的电动自行车,让消费者胆战心惊,安全性和可靠性需要进一步提升;
● 在北上广深,用户体验有待优化,而且对应的成本居高不下。
为了克服这些挑战,业界正在积极探索新的技术解决方案。特斯拉为代表的AI大模型+端到端技术被认为是一种有望突破现有瓶颈的关键方向。如下图所示,蔚来也在围绕自己的NADArch构建一整套框架。
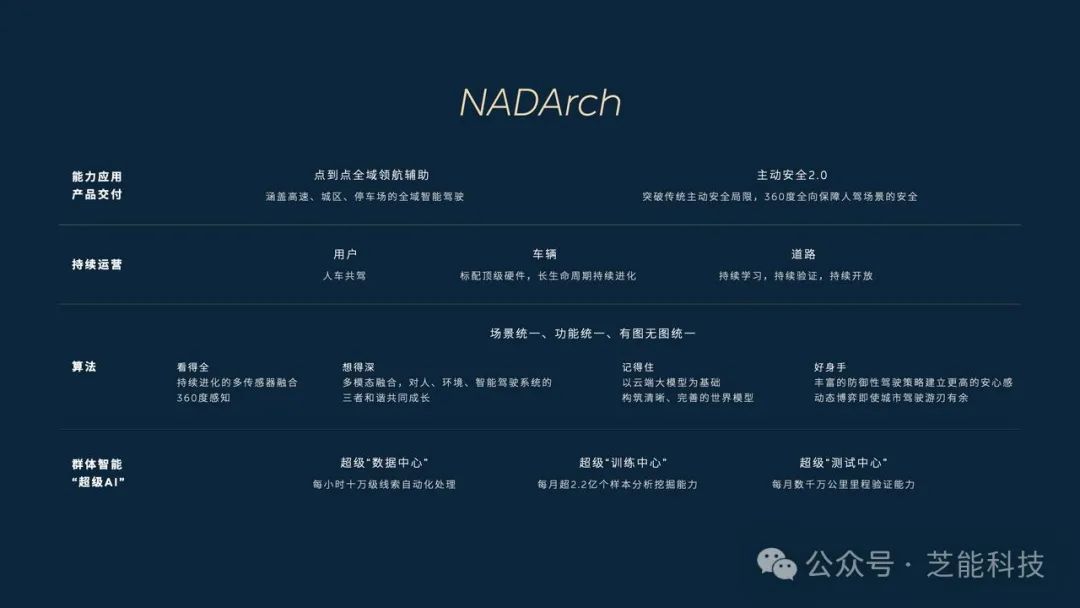
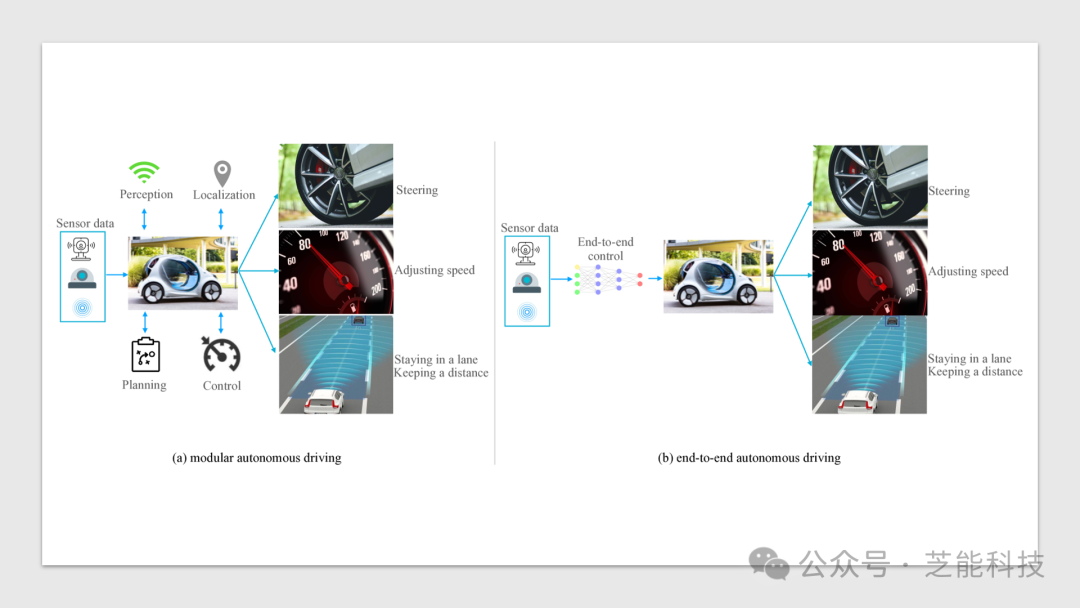
AI大模型是指能够处理大量数据并从中学习的机器学习模型。端到端是指将感知、决策和控制等自动驾驶功能模块整合在一起,形成一个整体的系统。
将AI大模型应用于城市NOA,可以显著提升其感知能力和决策能力。AI大模型能够从海量的道路数据中学习,识别各种交通参与者和交通标志,并预测他们的行为。
此外,AI大模型还可以基于对环境的理解,做出更加智能化的决策,例如选择最佳的变道时机和路线。
端到端架构则可以消除传统模块化架构中的信息冗余和延迟,使系统能够更加高效地做出反应。
● 渐进式路线:通往成功的现实路径
尽管AI大模型+端到端技术前景广阔,但其落地仍需要时间和成本的投入。城市NOA的发展应该采取渐进式路线,先从特定场景下验证技术的有效性,再逐步扩展应用范围。
车企已经开始推出通勤NOA功能,该功能能够在固定路线下实现自动驾驶。通勤NOA的应用,可以为进一步开发全场景城市NOA积累经验和数据。
● 要不要激光雷达,要不要传感器融合?
在传感器配置方面,业界认为多传感器融合方案是未来的发展趋势。单一传感器存在局限性,例如摄像头在光线不足的情况下性能会下降,激光雷达则受限于探测距离和成本。而多传感器融合可以扬长补短,提升感知的鲁棒性和精度。
在城市NOA的未来形态方面,业界认为既需要标准化功能,也需要个性化定制。标准化功能可以确保基本的安全驾驶需求,而个性化定制可以满足用户的差异化需求,提升用户体验。对于喜欢运动驾驶的用户,可以提供更加激进的驾驶风格;对于老年用户,可以提供更加保守的驾驶风格。
而城市NOA(导航辅助)的核心技术迭代:
● 高精度感知:不管是纯视觉还是融合算法,准确通过周围环境信息,构建实时路况感知模型,快速响应是第一位的
● 精准定位:利用SLAM算法实现车辆自身位置和姿态的实时估计,为类人化的规划和控制提供基础,让车辆响应更自然
● 智能决策:基于感知和定位信息,结合交通法规和驾驶策略,学习人类驾驶者的方法,生成安全合理的行驶方案。
● 协同控制:根据已经有决策方案,再根据道路的情况,精准控制车辆转向、速度和制动等动作,确保平稳流畅的驾驶行为
AI大模型+端到端技术的出现,为城市NOA的发展注入了新的活力。我们相信,围绕视觉的方法是确定的,无非是在整个框架层面不断通过数据来迭代。
 最前沿的电子设计资讯
最前沿的电子设计资讯

