近年来3D显示技术得到了飞速的发展,针对目前国内3D电视芯片的缺少而导致3D片源短缺、传统视频处理过程的复杂、红蓝3D视频观看时出现的重影、亮度降低等问题,本文设计了一款基于FPGA的3D视频前端处理与显示系统。以两路摄像头采集的信号作为输入源,采用Altera公司的Cyclone IV系列FPGA芯片为处理核心,实时的完成数据采集和图像处理,采用LCOS微显示器件作为显示单元,得到了效果逼真的3D视频图像。系统结构简便、性能稳定、图像清晰、并能较好地用于微投影显示系统中。
目前,3D显示已逐渐融入到人们的生活当中,因其能再现真实的三维场景,受到了人们的广泛热爱,红蓝3D图像获取的基本原理如图1所示。摄像头采集同一场景的两路视频图像信号,对其中一路信号只提取图像信号的红色分量;另一路提取图像信号的蓝、绿色合成的青色分量。将两路信号采用同步色差合成算法合成红蓝3D视频图像。目前国内3D电视产业面临的主要问题在于:(1)3D电视芯片的缺少而导致3D片源的短缺;(2)视频处理的复杂度较高;(3)显示与观看效果不佳。为此本文对传统的视频处理过程中色度分量的提取、亮度的增强、红蓝3D眼镜的设计等方面进行了改进,并采用LCOS作为微显示器件,投影出红蓝3D视频图像。
{pagination}
1 颜色分量的获取与亮度的增强
传统的方法只采用红加蓝、红加绿色度分量合成3D视频,这样会使画面的损伤较大,丢失33%以上的颜色分量,观看起来颜色失真较大,亮度也大大降低,增加了眼睛的负担,易产生疲劳。针对颜色失真本文采用红加青的方法以减少色度的丢失,这样可使画面色度饱和度还原到原始画面的90%以上。
针对亮度降低提出了基于亮度的图像增强方法。传统的基于Retinex理论的演变法存在一定的不足,如将RGB空间转换到HSI空间需要大量的三角函数运算,并采用傅里叶变换处理Retinex理论部分的高斯函数,大大影响处理速度。本文提出了基于YCbCr颜色空间的亮度分量处理法,同时采用无限脉冲响应数字滤波器(IIR)实现高斯函数运算。实验证明,该算法不但能增强图像的质量,还能有效避免Retinex算法中带来的光环效应,同时大大加快算法处理速度。基于亮度Y分量的Retinex 处理过程可表示为:
{pagination}
2 视频处理系统基本结构与简化
整个视频处理系统结构如图4所示。两路摄像头将采集到的信号送入TW2867进行A/D转换,输出的复用信号送入解复用(demux)模块,分离出的两路复合视频数据分别送入BT656数据解码模块、帧缓存控制模块、像素分辨率缩放模块、YCbCr 4:2:2转YCbCr 4:4:4数据模块、YCbCr亮度增强模块、YCbCr 4:4:4转RGB数据模块,最后将RGB数据送入LCOS时序控制模块,以镁光公司的CS-FLCOS作为微显示器件,搭建光机系统,显示出3D视频画面。对其中的TW2867芯片和LCOS芯片分别要进行I2C总线配置和SPI总线配置其内部的相关寄存器参数。
{pagination}
(3)像素分辨率缩放模块
帧缓存中装载的是两场视频数据,在读取的时候采用FIFO缓存并采用双线性插值算法,将原来720*576的像素分辨率放大到852*480。双线性插值算法将在水平和垂直两个方向分别进行一次线性插值。其定量计算方法如下:空间坐标系下四个点:A(x,y+1)、B(x,y)、C(x+1,y)、D(x+1,y+1),如图6所示,其灰度值依次为Ga、Gb、Gc、Gd,dx和dy分别表示目标点与点B在水平和垂直两个方向上的增量,其灰度值Gt可以由其余四点量化表示,如式2-1。
{pagination}
(5)YCbCr444-RGB模块
将YCbCr数据转换为RGB数据可由下图8所示数据关系得到。由于FPGA进行浮点运算较为复杂,且占用的时钟周期较长(比如16位的浮点加法电路,一般多达十几到二三十个时钟周期),并不适合于实时视频数据处理,所以先通过对上式左右二端放大128倍化为整数运算,计算后再对结果除以128(右移7位),即可获得正确的结果。
{pagination}
3 FPGA红蓝3D视频获取及主观评价
FPGA选用的是Altera公司的Cyclone IV系列的EP4CE30F23C6N这款高速FPGA芯片,FPGA和DDR2之间的时钟频率可以达到200M,DDR2内部时钟频率达到400M,充分满足了两路视频处理的要求。通过对视频处理过程中模块的编写,编译后其消耗的的逻辑单元数为13615个,仅占总逻辑单元数的47%,如下图11所示,使视频处理过程更加简便高效。将以上各模块搭建、调试、下载到FPGA中,并采用镁光公司的LCOS芯片作为微显示器件,摄像头采集到的《阿凡达》2D电影的一个画面转换为3D换面效果如下图12所示,可以看到图面中的人物具有视差的红蓝两路图像,佩戴上红蓝3D眼镜,即可看到人物出屏的效果。
目前针对于3D显示的评价的方法主要还是主观的评价方法,按照2000年国际电信联盟发布的ITU-R BT.1438立体电视图像主观评价标准,分为5级,即优秀、良好、一般、不好、坏五个级别。以立体图片上的一点为中心,单眼左右移动时,图像会出现连续的跳跃,两次跳跃之间眼睛移动的角度为立体图像的视变角,视角越大,观看越舒适,但视角变大意味着立体感减弱。通过多人观看本文的3D视频,本设计主观评价在良好级别,达到了预期的设计效果。

图1 红蓝3D图像获取基本原理
- 第1页:红蓝3D图像获取基本原理
- 第2页:颜色分量的获取与亮度的增强
- 第3页:视频处理系统基本结构与简化
- 第4页:像素分辨率缩放模块
- 第5页:RGB模块和LCOS时序控制模块
- 第6页:FPGA红蓝3D视频获取及主观评价







图3 加滤光片红蓝3D眼镜
- 第1页:红蓝3D图像获取基本原理
- 第2页:颜色分量的获取与亮度的增强
- 第3页:视频处理系统基本结构与简化
- 第4页:像素分辨率缩放模块
- 第5页:RGB模块和LCOS时序控制模块
- 第6页:FPGA红蓝3D视频获取及主观评价

图4 3D显示系统框图

图5 BT. 656行数据结构
- 第1页:红蓝3D图像获取基本原理
- 第2页:颜色分量的获取与亮度的增强
- 第3页:视频处理系统基本结构与简化
- 第4页:像素分辨率缩放模块
- 第5页:RGB模块和LCOS时序控制模块
- 第6页:FPGA红蓝3D视频获取及主观评价

图6 双线性插值法示意图

图7 YCbCr422转YCbCr 444操作示意图
- 第1页:红蓝3D图像获取基本原理
- 第2页:颜色分量的获取与亮度的增强
- 第3页:视频处理系统基本结构与简化
- 第4页:像素分辨率缩放模块
- 第5页:RGB模块和LCOS时序控制模块
- 第6页:FPGA红蓝3D视频获取及主观评价

图8 YCbCr444转RGB数据关系图

图9 Modelsim中LCOS时序仿真图
- 第1页:红蓝3D图像获取基本原理
- 第2页:颜色分量的获取与亮度的增强
- 第3页:视频处理系统基本结构与简化
- 第4页:像素分辨率缩放模块
- 第5页:RGB模块和LCOS时序控制模块
- 第6页:FPGA红蓝3D视频获取及主观评价

图11 视频处理过程的硬件开销
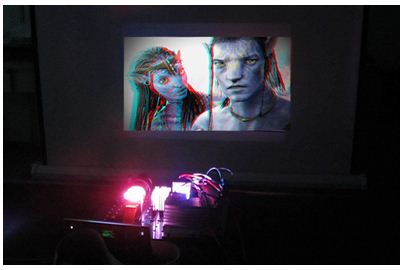
图12 红蓝3D效果图
- 第1页:红蓝3D图像获取基本原理
- 第2页:颜色分量的获取与亮度的增强
- 第3页:视频处理系统基本结构与简化
- 第4页:像素分辨率缩放模块
- 第5页:RGB模块和LCOS时序控制模块
- 第6页:FPGA红蓝3D视频获取及主观评价
上一篇:
IIC 2015春季研讨会热点抢先看
-
微信扫一扫
一键转发 -
 最前沿的电子设计资讯
最前沿的电子设计资讯
请关注“电子技术设计微信公众号”
- Achronix推出基于FPGA的加速自动语音识别解决方案 提供超低延迟和极低错误率(WER)的实时流式语音转文本解决方案,可同时运行超过1000个并发语音流
- Microchip FPGA采用量身定制的PolarFire FPGA和SoC解 涵盖工业和通信领域以及智能嵌入式视觉、电机控制和光学接入技术等十个系列的协议栈,内容包括 IP、参考设计、开发套件、应用说明、演示指南等
- AMD 以面向工业与商业应用的 Kria K24 SOM 及入 K24 SOM 和 KD240 套件支持为电机控制和数字信号处理应用设计高能效量产就绪型解决方案,并加速上市进程···
- AMD Kria新品只有信用卡一半大,无需FPGA经验一小时内 日前,AMD宣布推出AMD Kria™ K24系统模块(SOM)和KD240驱动器入门套件,这是Kria自适应SOM及开发者套件产品组合的最新产品。AMD Kria K24 SOM能以小尺寸提供高能效计算,面向成本敏感型工业和商业边缘应用···
- 通过AI加速,智能终端应用得到创新提升 京微齐力采用Imagination AI加速器,助力打造Avatar高端产品系列第一颗新型智能加速芯片,为不同行业用户提供高性价比、强适配性的系统级平台解决方案
- 2023年嵌入式调查:随着工作负载的激增,更多IP将会被重复 最新的2023年嵌入式调查已经出炉,它不仅显示了迅速增长的工作负载以及工程师如何应对处理,还展示了最常用的设计工具、操作系统和处理器。
- Microchip发布业界能效最高的中端FPGA工业边缘协议栈 这些新工具使得转向使用PolarFire FPGA和片上系统(SoC)FPGA变得比以往更容易
- 采用CEM插卡模式的VectorPath®加速卡在业内率先通过P Achronix半导体公司今日宣布:其搭载了Speedster®7t FPGA器件的VectorPath加速卡已通过PCI-SIG的PCIe Gen5认证,并且是PCI-SIG 集成商列表中的第一款也是唯一一款通过 PCIe Gen5 x16 认证的FPGA(CEM)加速卡,传输速率达到了32GT/s。
- 无人机视觉跟踪系统解决方案-米尔基于XILINX XCZU3EG 近些年来,计算机视觉技术和无人机技术蓬勃发展,摄像头的像素和工艺也越来越完善,基于这一基础,无人机视觉跟踪技术成为炙手可热的研究领域。
- AMD推出首款5nm基于ASIC的媒体加速器卡,开启大规模交互 专用视频处理架构支持AV1加速处理,每卡可提供32路1080p转码密度,并支持AI优化视频质量
- 直击2023 IIC上海现场,半导体国产化的全速“狂飙” 在3月29日和3月30日,由电子工程领域全球领先的技术媒体机构AspenCore主办的2023国际集成电路展览会暨研讨会(IIC)上海展会活动现场,汇聚了众多国内外优质展商,EDN小编在现场参观走访时,也发现不少的国产厂商都提到了“国产化”,就让我们一起来看看这些国产厂商在这条路上做了哪些努力,又是怎样推动了国产化的全速“狂飙”。
- 米尔基于Zynq 7000系列单板的FPGA农业生产识别系统 随着农业生产模式和视觉技术的发展,农业采摘机器人的应用已逐渐成为了智慧农业的新趋势,通过机器视觉技术对农作物进行自动检测和识别已成为采摘机器人设计的关键技术之一,这决定了机器人的采摘效果和农场的经济效率。
- 2024年1月第3周新能源周销量 本周我们还是关注我们芝能热点品牌的情况,我们罗列了品牌和重点车型的情况···
- 与健康息息相关的分子马达(二) 细胞是一个包含多种分子马达的复杂系统,分子马达功能各异,协作完成细胞活动。但分子马达的功能异常或表达异常
- 拆解报告:酷态科10000mAh 30W快充移动电源 酷态科这款移动电源内置两节21700电池,总容量为10000mAH,体积小巧便携。移动电源两侧分别设有USB-C和USB-A接
- 华为FreeClip开放式耳机全球首拆 HUAWEI华为FreeClip开放式耳机在外观方面,采用极简主义几何设计,兼具了全天候舒适佩戴和时尚佩饰属性。在功能
- 神通552125软包电芯评测 这款神通552125软包电芯,我爱音频网分别在0.2C、0.5C以及1C三种倍率下进行测试,充电方面,1C倍率充电能在1小时2
- 华为FreeClip开放式耳机首发评测 作为华为旗下首款开放式耳机,FreeClip 采用了少见的「夹耳式」结构,整体呈 C 型,通过夹耳廓的形式固定在耳朵上
- 生物生命活动驱动者,与人类健康息息相关的分子马达(一) 分子马达由生物大分子构成,能够将化学能转化为机械能。分子马达作为具有特定结构的蛋白质,能够通过自身的运动
- 人形机器人之关键触觉传感器:刚性到柔性 触觉传感器是机器人进化的核心需要解决的问题,芝能科技将带你逐步了解触觉传感器的技术原理、技术路线、发展
- 拆解报告:美富达65W 2C1A氮化镓快充充电器 美富达这款65W充电器具备2C1A输出接口,并配有美标折叠插脚。充电器机身上没有标注任何产品信息。实测充电器
- 详细解读ACLR和ACPR 今天射频学堂将和大家一起抽丝剥茧一个射频指标——ACLR。
- 消失的她,GERBER失踪之谜 Gerber格式是线路板行业软件描述线路板(线路层、阻焊层、字符层等)图像及钻、铣数据的文档格式集合。明明有图
- OpenAI进军芯片行业 OpenAI,这个人工智能行业的当红小生,正积极探索半导体市场的机会。OpenAI首席执行官Sam Altman已开始与中东知
- Wi-Fi Alliance选用RUCKUS Wi-Fi 7平台作为Wi-Fi CERTIFIED 7互 RUCKUS Wi-Fi 7接入点为Wi-Fi CERTIFIED 7设备制定标准并支持全球互操作性
- 安霸发布前端AI开发者平台:Cooper Cooper开发者平台为工业应用、AIoT、智能视频分析和前端AI计算应用提供高能效解决方案。
- Microchip推出10款多通道远程温度传感器 MCP998x系列是单一供应商提供的最大车规级远程温度传感器产品组合之一
- 罗克韦尔自动化发布《可持续发展2023年度报告》 阐述在可持续发展方面的进展和成果
- Melexis首创Triphibian技术可实现MEMS压力敏感元件革新 Melexis今日宣布,推出首款采用全新专利Triphibian™技术的压力传感器芯片MLX90830。
- 上海首家第三方整车OTA测试实验室携手MVG 填补智能网联汽车测 MVG近日宣布,中国信通院上海工创中心(以下简称“上海工创中心”) 与浙江埃科汽车技术服务有限公司(以下简称“
- Transphorm发布两款4引脚TO-247封装器件,针对高功率服务器、可再 新推出的氮化镓场效应晶体管可作为原始设计选项或碳化硅(SiC)替代器件
- 全国产六核CPU商显板,米尔-芯驰D9360高性能高安全显控方案 今天给大家介绍一款国产厂商(芯驰科技)推出的六核高性能、高安全性芯片:D9-Pro,这款芯片有超强视频编解码能力,米
- 意法半导体与Sphere Studios联合打造全球最大的电影摄影机图像传 该影像传感器专为世界上最先进的摄影系统 Big Sky而定制,能够为拉斯维加斯的 Sphere球幕拍摄超高分辨率影像
- 美光率先上市基于LPDDR5X的 LPCAMM2内存模块,变革PC用户体验 LPCAMM2 内存模块以更高性能、更低功耗、更小的外形规格助力笔记本电脑实现更快速度、更小巧尺寸和更强续航
- 瑞萨推出其首款集成闪存的双核低功耗蓝牙SoC并实现最低功耗 全新DA14592 SoC和DA14592MOD模块支持众包定位等广泛应用,同时带来最低eBoM
- Vishay为其高性能红外接收器模块推出升级版 器件可提供即插即用方式替换现有解决方案,降低更宽电源电压范围内的供电电流,提高抗ESD可靠性、黑暗环境灵敏

